Views: 619
DM164 является стабилизатор тока с ШИМ для управления светодиодами. 8×3-каналов постоянного тока схема со значением устанавливаемыми тремя внешними резисторами , 65536 уровнями яркости формируемые ШИМ, 128 уровней регулировка тока для каждого канала и 256 уровней глобального управления яркостью (баланс белого). Каждый канал предоставляет максимальный ток 90 мА. DM164 также поддерживает обнаружение обрыва цепи светодиода, сигнализация перегрева драйвера и функцию выключения. Есть два способа, чтобы получить сигнал ошибки в системе. Один из них через последовательные выходные данные, позволяет получить информацию конкретно в каком канале произошёл обрыв светодиода. Другой с помощью специального аварийного выхода.
Особенности
- Выходы со стабилизаторами тока, ток задается тремя внешними резисторами.
- Макс частота ШИМ тактовая
- 36 МГц @ VDD = 3.3V (Частота обновления 550 Гц ≒), 40 МГц @ VDD = 5В (610Hz)
- Максимальная частота тактовая данных
- 30MHz @ VDD = 3.3V, 35MHz @ VDD = 5В
- Максимальный выходной ток одного канала: 90 мА
- Максимальное выходное напряжение: 17V
- 16-бит яркости для каждого светодиода
- Глобальная регулировка яркости 8-бит (Баланс белого)
- Регулировка тока 7-бит для каждого светодиода (точная Коррекция)
- Напряжение питания: 3 В до 5,5 В
- Обнаружение обрыва светодиода
- Тепловая сигнализации и выключение драйвера
- Сигнализация (температура перехода> 130 ° C)
- Выключение (температура перехода> 170 ° C)
- Вариант первый-Shot
- Встроенный буфер для данных, ШИМ генератор, регистр данный
- Средняя отдельная опция IOUT ШИМ Waveform
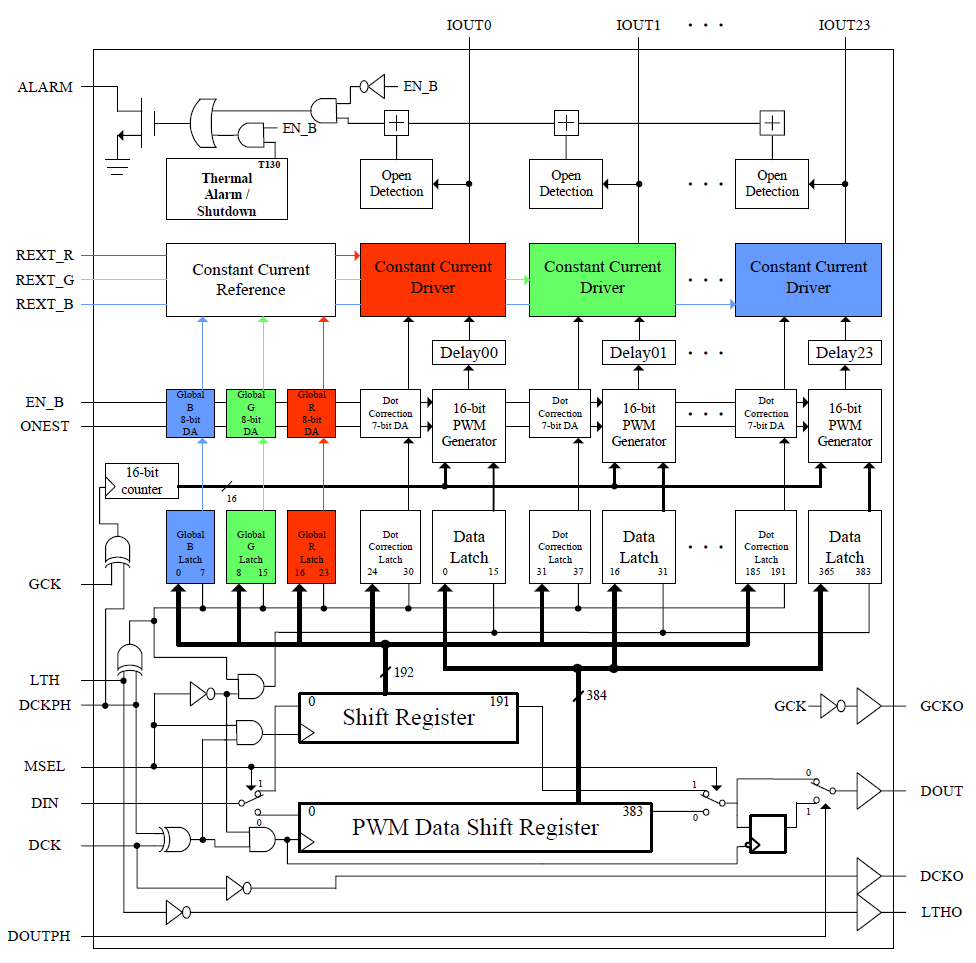
Блок схема
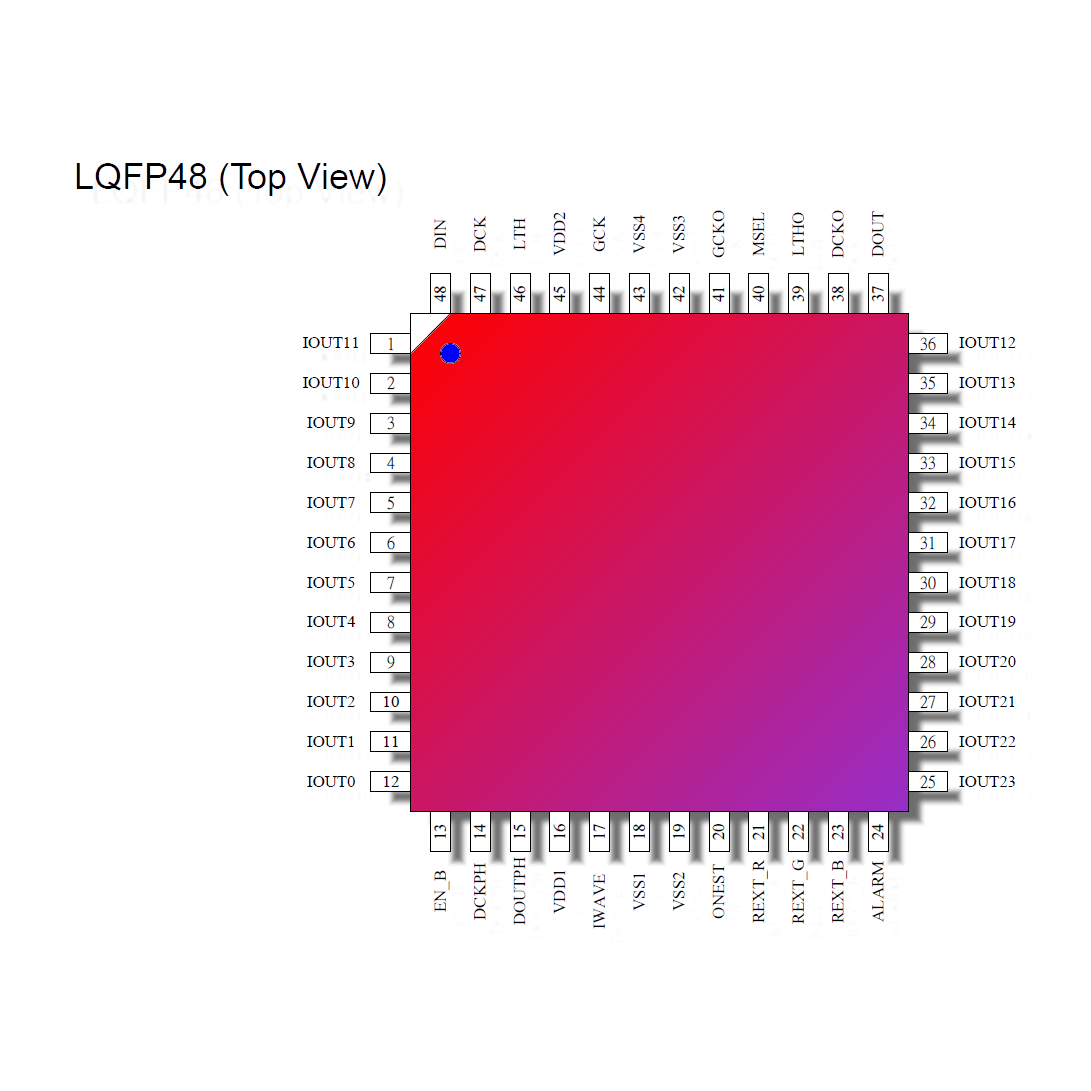
Описание выводов
| Номер вывода | Название | Описание |
| 16,45 | VDD1,VDD2 | Питание драйвера |
| 18,19,42,43 | VSS1~4 | Общий питание драйвера |
| 21 | REXT_R | Внешний резистор установки тока для выводов IOUT0, 3, 6, 9, 12, 15, 18, 21. |
| 22 | REXT_G | Внешний резистор установки тока для выводов IOUT1, 4, 7, 10, 13, 16, 19, 22. |
| 23 | REXT_B | Внешний резистор установки тока для выводов IOUT2, 5, 8, 11, 14, 17, 20, 23. |
| 12,11,10,9,8,7, 6,5,4,3,2,1 |
IOUT0~11 | LED выходы драйверов. |
| 36,35,34,33,32,31 30,29,28,27,26,25 |
IOUT12~23 | LED выходы драйверов. |
| 48 | DIN | Вход последовательных данных. |
| 37 | DOUT | Выход последовательных данных. |
| 47 | DCK | Вход синхроимпульсов для последовательной передачи данных. Входные данные DIN могут быть переданы либо по нарастающему фронту DCK или заднему фронту DCK в зависимости от сигнала DCKPH. |
| 38 | DCKO | Выход синхроимпульсов для последовательной передачи данных. DCKO= |
| 14 | DCKPH | Если DCKPH = L, ввод данных передаются в драйвер по фронту DCK, Если DCKPH = Н, ввод данных передаются в драйвер по заднему фронту DCK |
| 15 | DOUTPH | Если DOUTPH = H, DOUT данные передаются на выход с половиной задержки DCK цикла Если DOUTPH = L, DOUT данные передаются на выход без задержек |
| 46 | LTH | Вход сигнала управления загрузкой данных в ШИМ. Если DCKPH=L & LTH=H или DCKPH=H & LTH=L, данные из сдвигового регистра драйвера, загружаются в регистр ШИМ (яркости) и значение счетчика управляющего ШИМ будет установлено в FFFF(h). Если DCKPH=L & LTH=L или DCKPH=H & LTH=H, данные загружаются в сдвиговый регистр драйвера. |
| 39 | LTHO | Выход сигнала управления загрузкой данных. LTHO = |
| 44 | GCK | Вход тактовой частоты для ШИМ генератора. Если DCKPH=L (DCKPH=H), внутренний счетчик ШИМ генератора считает по фронту (срезу) тактовых импульсов GCK. |
| 41 | GCKO | Выход тактовой частоты для ШИМ генератора. GCKO = |
| 13 | EN_B | Управление выходами. Если EN_B = H, все выходы принудительно отключаются. Если EN_B = L, все выходы управляются ШИМ. |
| 40 | MSEL | Если MSEL = H, регулировка Dot Коррекция данных и глобальных данных Регулировка яркости Режим ввода (D & G режим). Если MSEL = L, загрузка данных яркости ШИМ данных входной режим (режим GD). |
| 24 | ALARM | Выход с открытым стоком для функции Аварии. Если EN_B = L, Будет низкий уровень если есть обрыв LED. Если EN_B = H, Будет низкий уровень если чип перегрелся. |
| 17 | IWAVE | Если IWAVE = H, традиционный режим формирования яркости ШИМ (Iout). Если IWAVE = L, Режим среднее значение Iout формы сигнала ШИМ. |
| 20 | ONEST | Если ONEST = H, опция однократная индикация данных включена (One-Shot). Если ONEST = L, опция однократная индикация данных отключена (постоянная индикация загруженных данных). |
Распиновка
Временная диаграмма
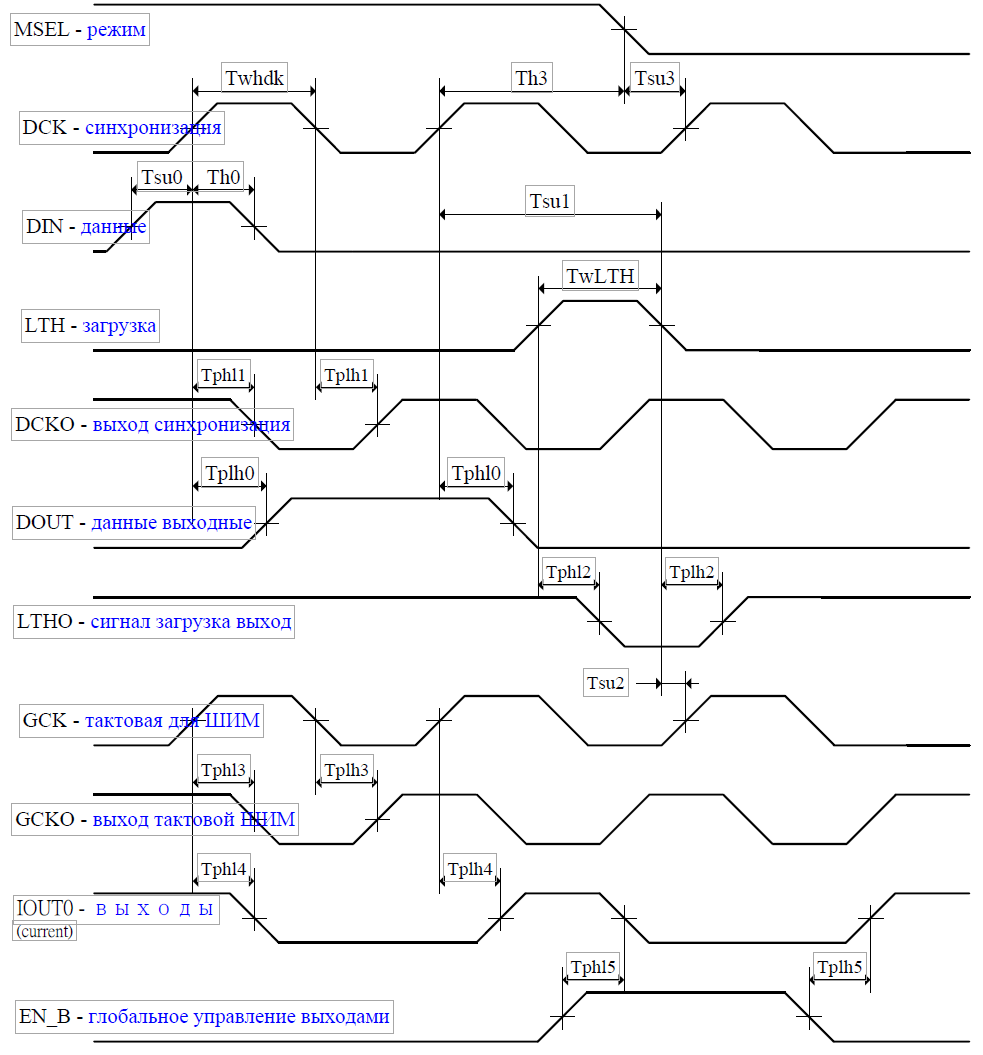
Последовательный интерфейс передачи данных
DM164 включает в себя гибкий интерфейс передачи данных. Данные могут быть загружены черз DIN вход, в регистр сдвига, и синхронизированы по любому фронту сигнала DCK. Управляющий фронт устанавливается уровнем на входе DCKPH. После того как все данные загружены в сдвиговый регистр, по сигналу LTH (высоким уровнем) может быть выполнена загрузка последовательных данных в регистр ШИМ (управление уровнем). Последовательный формат данных может быть 192 или 384-битным, в зависимости от режима работы устройства.
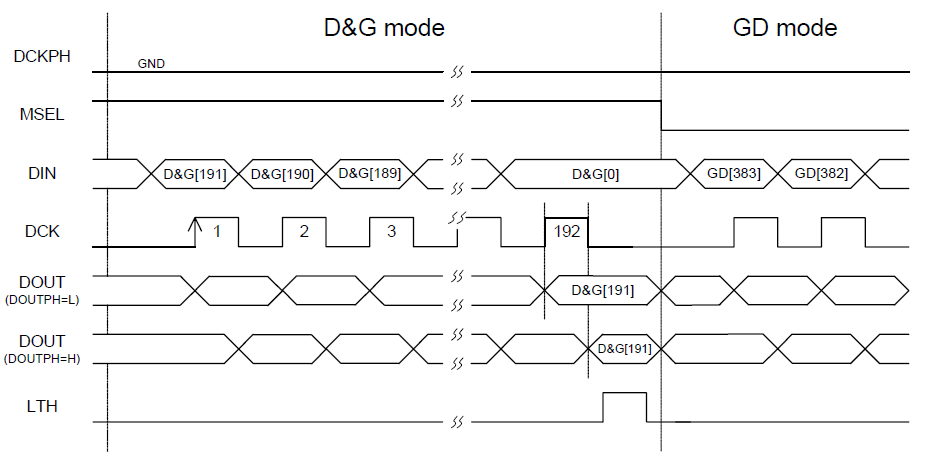
Режимы работы
DM164 имеет два режима работы в зависимости от сигнала MSEL. В таблице показаны доступные режимы работы. Когда MSEL = H, устройство работает в режиме D&G. Режим D&G используется для корректировки яркости отдельного канала и для глобальной регулировки яркости по каждому цвету в отдельности. Когда MSEL = L, устройство переходит в режим GD. Режим GD используется для управления яркость светодиодов в 16 битном режиме.
| MSEL | РЕЖИМ | Емкость регистра |
| H | Данные коррекции яркости отдельного светодиода и глобальная регулировка яркости (режим D&G) | 192-bit |
| L | Данные яркости ШИМ (режим GD) | 384-bit |
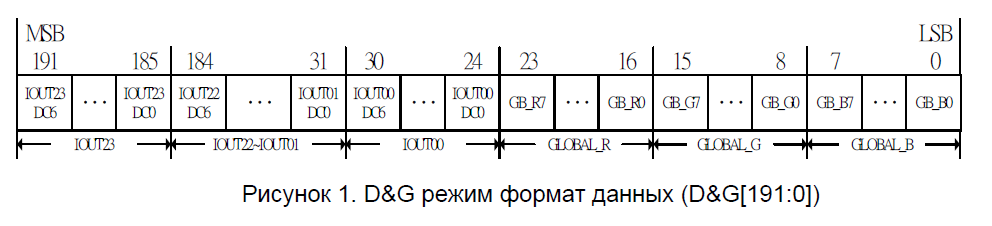
D&G Режим и Формат данных
В режиме D&G, коррекции яркости всех каналов и глобального управления яркостью разных цветов передаются в драйвер одновременно. Полный формат коррекции яркости светодиода состоит из 24х7-бит и 3х8-бит трех различных цветов данных глобального контроля яркости. Общая длина регистра сдвига в режиме D&G составляет 192-бита. Все данные передаются в регистр MSB (старшим битом) вперед. На рисунке 1 показан формат данных режим D&G.
Для работы с DM164 в режиме D&G, MSEL должен быть установлен в высокий уровень. Ширина регистра сдвига равна 192-битам. Входные данные могут быть переданы либо на переднему фронту DCK или заднему фронту DCK, установив DCKPH в L или H. После того как все данные переданы в регистр режима сдвига D&G, данные режима D&G можно загрузить из регистра сдвига в в регистры коррекции и управления яркостью по сигналу LTH. На рисунке показана временная диаграмма ввода данных в режиме D&G.
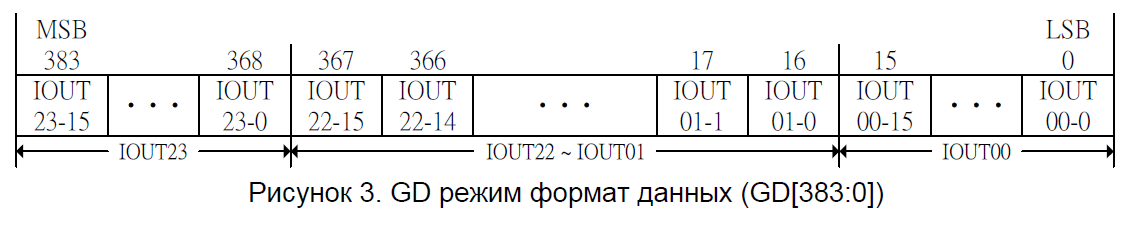
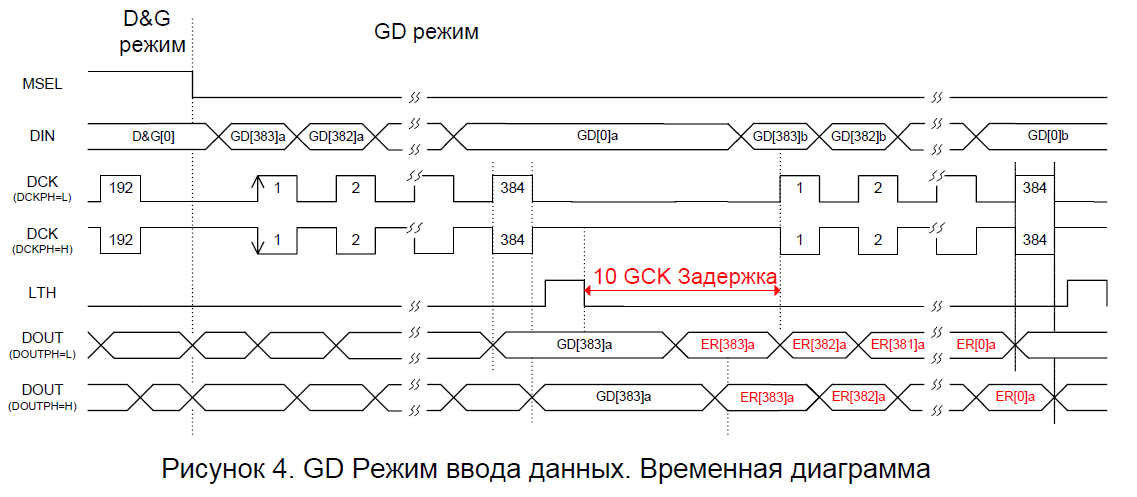
GD Режим и Формат данных
В режиме GD, данные яркости ШИМ будут переданы в регистры сдвига. Полный формат данных оттенки серого ШИМ состоит из 24х16 бит. Общая ширина регистра сдвига в режиме GD является 384-бит. Все данные яркости ШИМ передаются на с MSB старшим битом вперед. На рисунке 3 показан формат данных в режиме GD.
Когда MSEL установлен в низкий уровень, DM164 переходит в режим GD. Внутренний регистр сдвига длиной в 384-бита. Входные данные могут быть переданы либо на переднему фронту DCK или заднему фронту DCK, установкой DCKPH в L или H. После того как все данные переданы в регистр сдвига, данные можно перегрузить из регистра сдвига в регистр данных ШИМ по сигналу LTH. На рисунке показана временная диаграмма ввод данных в режиме GD.
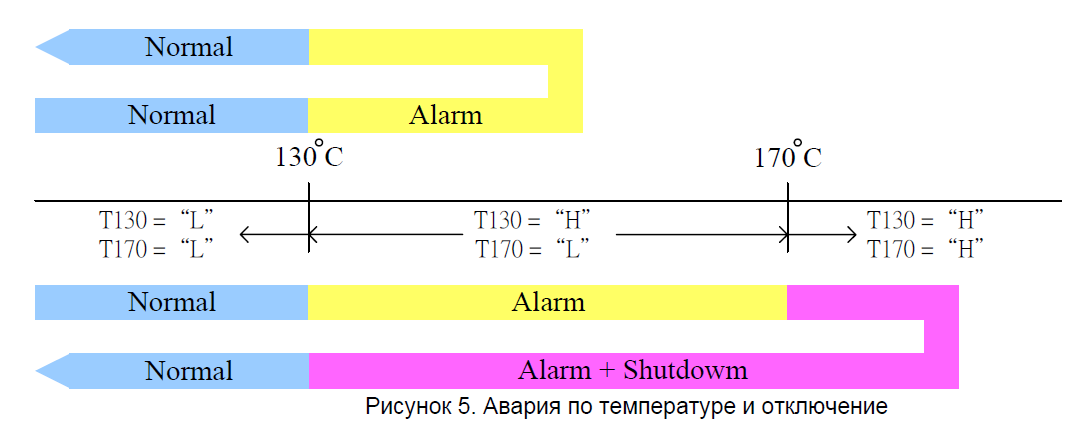
Тепловая сигнализации и автоматическое отключение при перегреве драйвера
DM164 обеспечивает схему обнаружения ошибки температура, при EN_B = Н и если температура перехода драйвера достигает около 130°С, сигнал T130 изменит состояние выхода ALARM, он будет переведен в низкий уровень. В этот момент система должна включить вентилятор или уменьшить выходной ток, чтобы понизить температуру перехода. Если система не имеет защищаемой цепи, температура перехода может продолжать расти. Как только он достигает приблизительно выше 170°C, сигнал T170 и сигнал Завершение работы выключит драйвер посредством отключения всех выходов, сигнал ALARM остается в низком уровне. Когда драйвер остынет и вернется к безопасной рабочей температуре, примерно ниже 130°С, сигнал ALARM переключиться в высокий уровень, отключиться предупреждение, и включаться все выходы. Работа при перегреве в течение длительного времени может привести к без поворотному повреждению драйвера. Сигналы аварии температуры (T130, T170, завершение работы) могут быть переданы через DOUT выход.
Детектирование обрыва светодиода
Если один из 24 светодиодов будет поврежден или отключен, DM164 может обнаружить и сообщить об ошибке. Схема обнаружения работает при выполнении следующих двух условий одновременно:
- IOUTn находится в (IOUTn > 200ns и EN_B=”L”).
- Случае если выходное напряжение на IOUTn меньше 0.2 V
Сигнал ошибки (ОРЕ) имеет два способа передачи сигналов об ошибках в системе. Первый через чтение последовательных данных, в которых можно конкретно увидеть место обрыва светодиода (Open = H => IOUTn открыт). Другой с помощью специального аварийного выхода, когда EN_B = L.
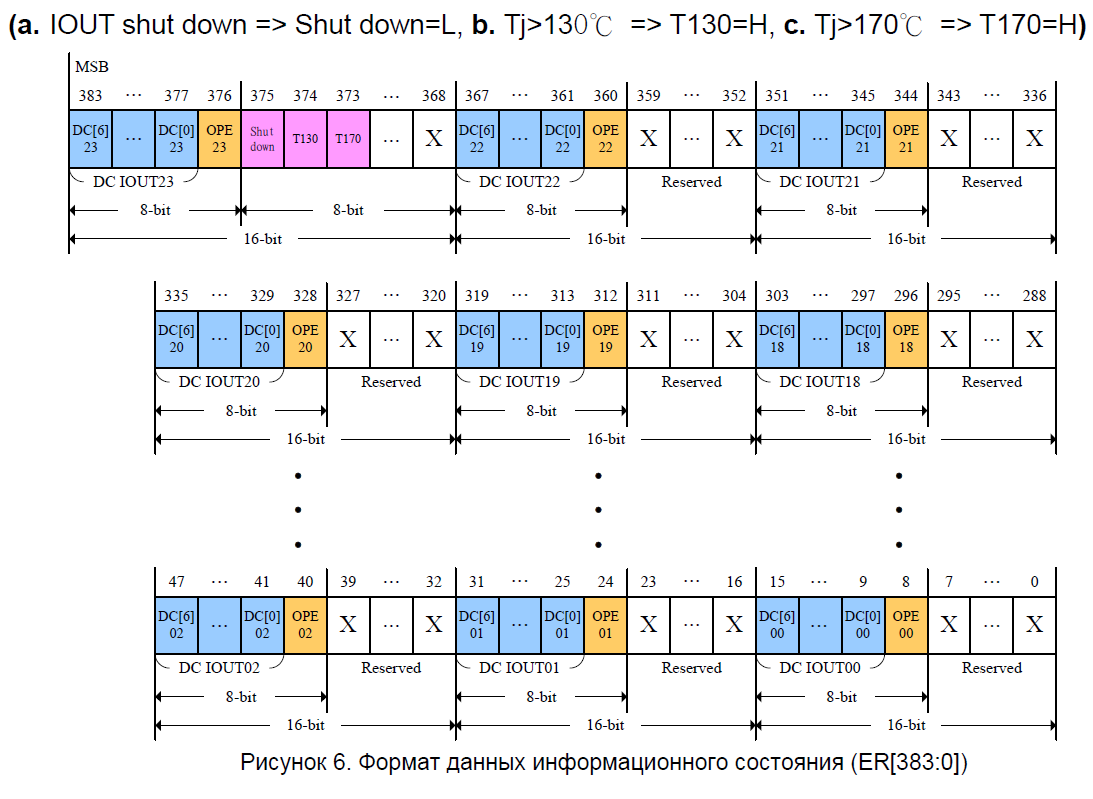
Чтении информации состояния драйвера
Когда DM164 работает на режиме GD, после поступления сигнала LTH фиксирует входные данные из регистров сдвига с защелками данных, данные регистров сдвига будут заменены информацией о статусе. Информация о состоянии включает в себя сигналы аварии по температуре (Завершение работы, T130 и T170,), флаг обнаружения обрыва светодиода (OPE) и данные коррекции яркости (DC), которые будут переданы из DOUT штифта. На рисунке показан формат информации состояния.
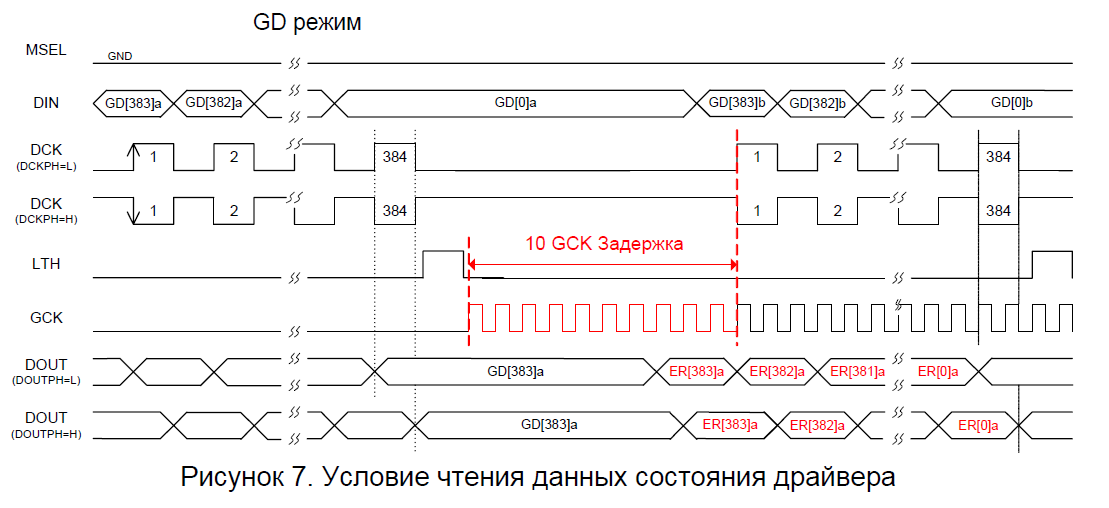
Чтобы получить правильные сигналы об ошибках. DCK должны ждать по крайней мере 10 GCK задержки после того, как сигнал LTH фиксирует входные данные. На рисунке показана временная диаграмма.
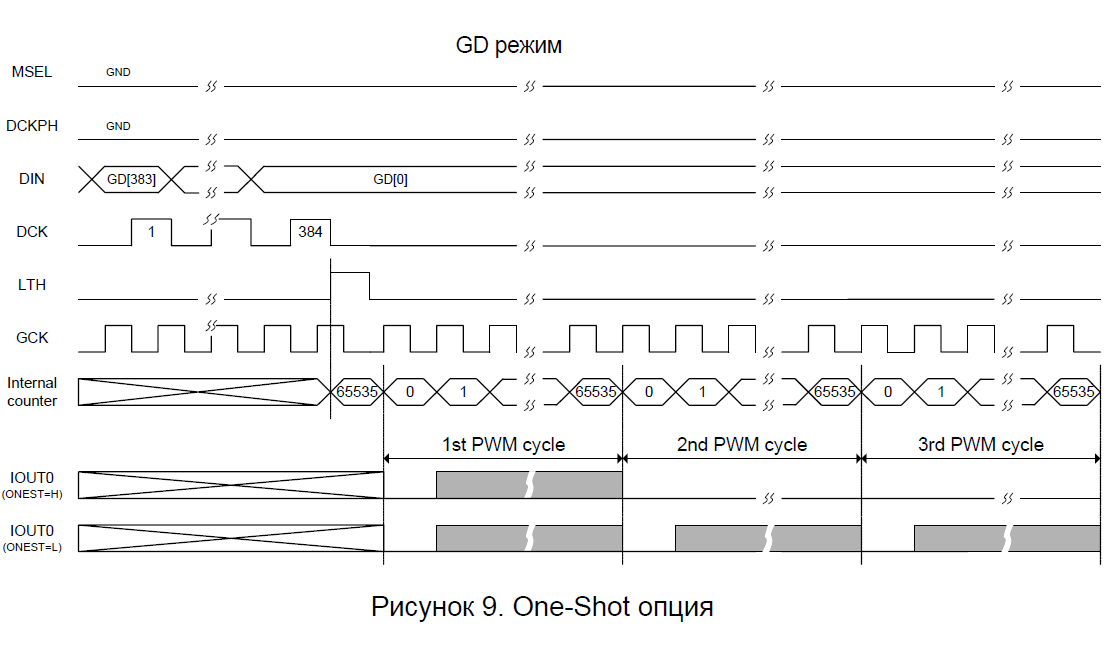
One-Shot Опция
DM164 предоставляет возможность однократного вывода загруженных данных яркости. В этом режиме загруженные данные яркости индицируются всего один раз после сигнала LTH (только для режима GD), выход только включить для одного цикла (65536 TGCK). После окончания цикла (65536 TGCK), выход автоматически отключается. Это называется функция One-Shot. Рисунок 9 показывает разницу между One-Shot и без нее. Когда ONEST = H, функция One-Shot включена. Выход будет просто включиться в первом ШИМ цикле. Когда ONEST = L, функция One-Shot отключена. Выход будет работать в каждом цикле ШИМ.
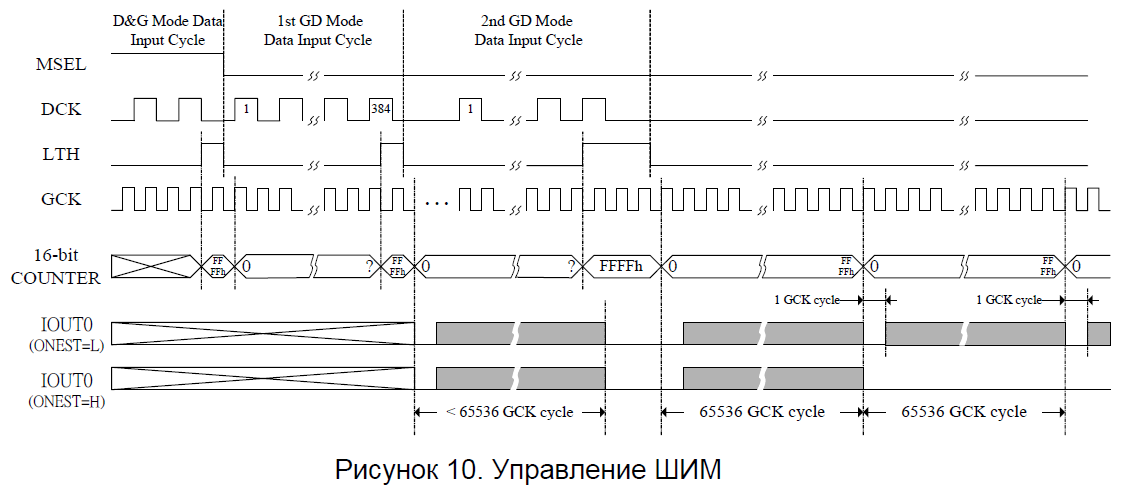
Управление ШИМ
Когда DCKPH = L, цикл ШИМ начинается с падающим фронтом LTH (см. рисунок 10). Сигнал LTH = Н установит 16-битное значение счетчика ШИМ FFFFh. Первый GCK импульс после LTH увеличивает ШИМ счетчик на единицу и переключает все выходы IOUT со значение больше 0. Каждый следующий нарастающий фронт GCK увеличивает ШИМ счетчик на единицу. DM164 сравнить все значения каналов IOUT со счетчиком ШИМ. Если значение счетчика ШИМ становиться больше, значение в канале IOUT – канал отключается.
Максимальный выходной ток
Максимальный выходной ток устанавливается внешним резистором. Резистор подключается между Rext и GND. Варьируя сопротивление резистора можно регулировать текущий масштаб в диапазоне от 5 мА до 90 мА. Опорное напряжение Rext терминала (Vrext) составляет приблизительно 1,23. Максимальный выходной ток (Imax) значение может быть вычислено приблизительно по следующему уравнению:
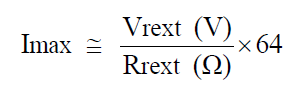
где:
Vrext = 1.23V
Rrext = сопротивление токозадающего резистора.
Пример: ток 20 мАм. Rrext =1,23*64/0,02=3936 ом. Берем значение ближайшее меньшее 3,9 кОм. Проверяем Imax = 1,23*64/3900=0,02018.
Общий контроль яркости
Функция управления общей яркостью может регулировать общий ток для каждого цвета отдельно. Выходной ток (Iglobal) может быть скорректирована в 256 шагов от ((1/256)*100)% до 100% от заданного максимального выходного тока. Следующее уравнение может вычислить общий ток управления яркостью (Iglobal)
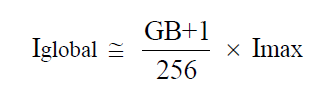
где:
Imax = Максимальный выходной ток.
GB = глобальное значение регулировка яркости для различных цветов.
Dot Correction – коррекция яркости отдельного светодиода
Кроме глобального контроля яркости, DM164 также имеет возможность регулировать выходной ток каждого канала (IOUT00 – IOUT23) в отдельности. Выходной ток (Idot) может быть скорректирована в 128 шагах от ((1/128)*100) % to 100% глобальной тока управления яркостью. Следующее уравнение можно вычислить ток коррекции точка (Idot):

где:
Iglobal = общая текущая регулировка яркости
DC = корректирующая величина текущего канала
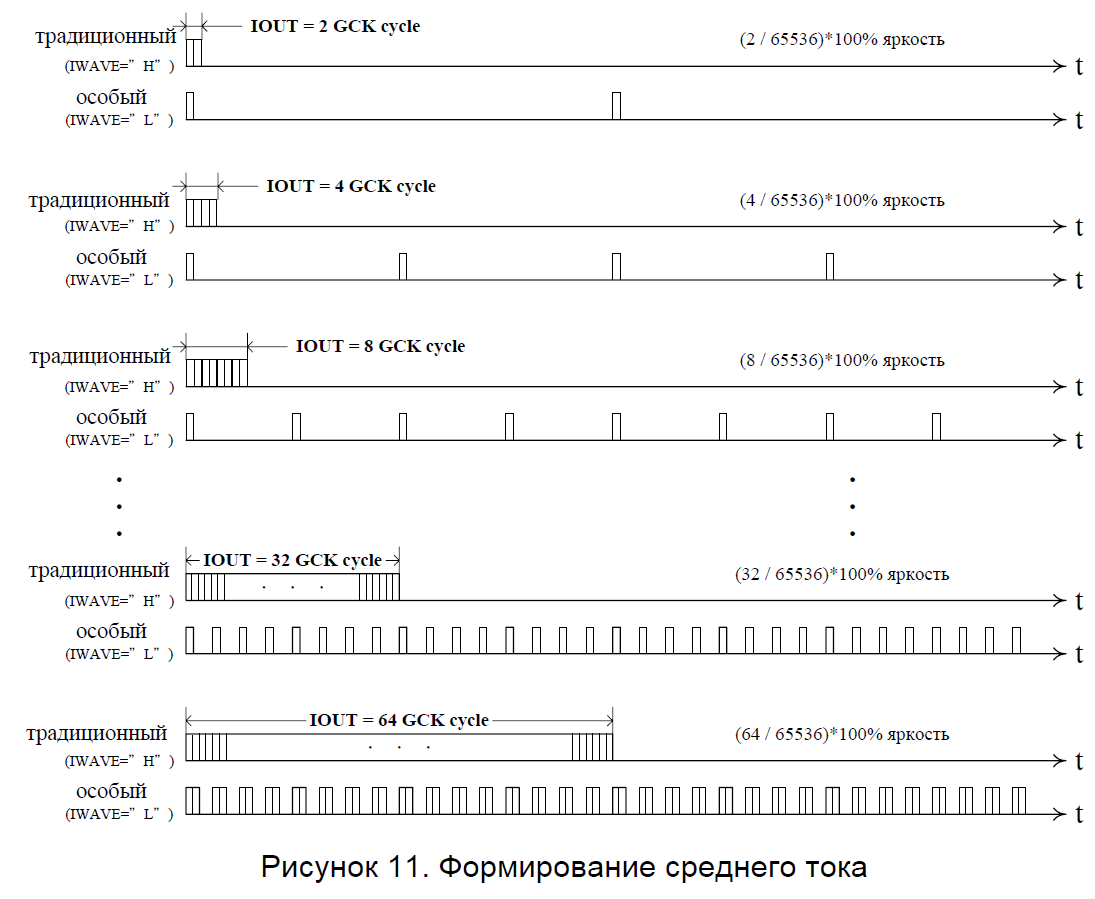
Формирование среднего тока по всей длине ШИМ
DM164 включает в себя два режима работы ШИМ счетчика, традиционный вариант и вариант который позволяет компенсировать паразитную емкость светодиода и сделать изменение светимости максимально корректным (без скачков). В DM164, когда IWAVE = “L”, форма волны IOUT будет в среднем разделен на 32 (максимум) секций. Рисунок 11 показывает разницу между традиционным формирование управления ШИМ сигнала и Особым режимом DM164.
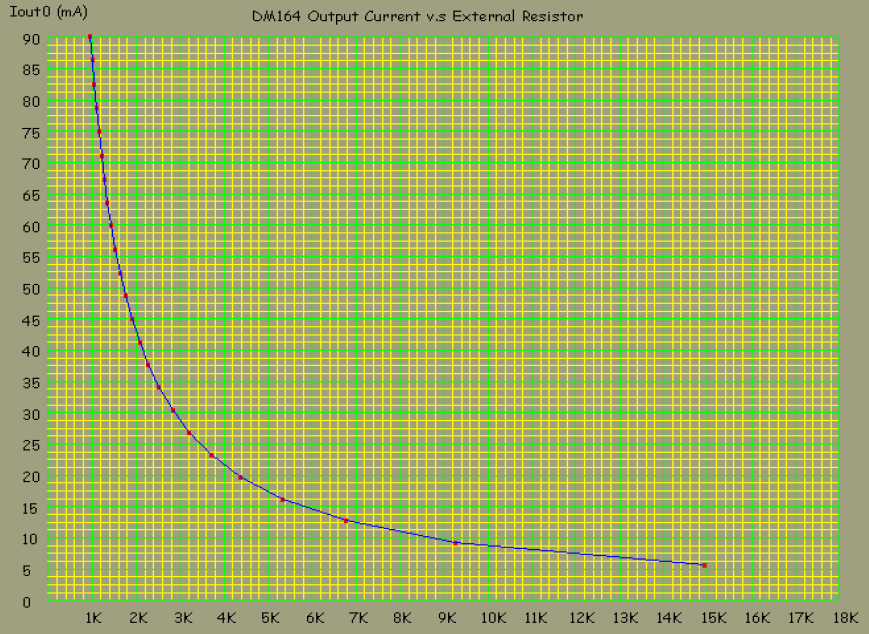
Зависимость – выходной ток от внешнего резистора
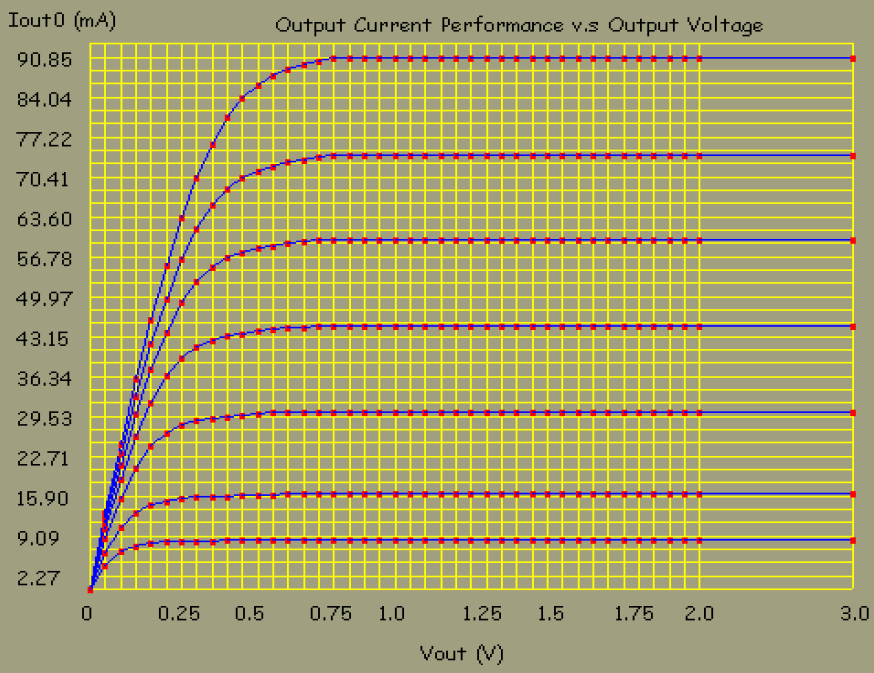
Зависимость – Выходной ток и Выходное напряжение
продолжение следует…
Это может быть интересно
 Сенсорный выключатель светаViews: 16553 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 16553 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … Простой сенсорный регулятор светаViews: 2518 Простой сенсорный регулятор. Проект – 2007 года. Регулятор выполнена на микроконтроллере PIC12F683 и имеет минимальное количество элементов. Выполняет стандартные функции, включение выключение света, изменение яркости, запоминание последнего установленного уровня …
Простой сенсорный регулятор светаViews: 2518 Простой сенсорный регулятор. Проект – 2007 года. Регулятор выполнена на микроконтроллере PIC12F683 и имеет минимальное количество элементов. Выполняет стандартные функции, включение выключение света, изменение яркости, запоминание последнего установленного уровня … Проект с использованием MCC часть 09Views: 1071 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая …
Проект с использованием MCC часть 09Views: 1071 Эта часть будет посвящена созданию практического проекта управления освещение. Тех задание: Два выхода управления ШИМ – светодиодным освещением. Две кнопки управления, каждая кнопка управляет, своим каналом, логика самая … Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 694 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver …
Arduino LCD + STONE STVI056WT-01 + Strain gaugeViews: 694 Author li grey email: greyli1987@outlook.com The strain assessment instrument is used to assess the degree of corresponding muscle strain by obtaining the muscle surface action potential through silver … Стабилизатор тока на SN3350, часть 2Views: 1361 Если вам необходимо разработать устройство с применением мощных светодиодов, то никак не обойтись без применения стабилизатора тока. На настоящий момент стабилизаторы тока являются самым эффективным механизмом, для питания светодиода в течение всего …
Стабилизатор тока на SN3350, часть 2Views: 1361 Если вам необходимо разработать устройство с применением мощных светодиодов, то никак не обойтись без применения стабилизатора тока. На настоящий момент стабилизаторы тока являются самым эффективным механизмом, для питания светодиода в течение всего … Проект с использованием MCC часть 12-1Views: 1138 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно …
Проект с использованием MCC часть 12-1Views: 1138 В настоящее время без визуализации информации уже не интересно. Поэтому научимся выводить информацию на дисплей. Для это возьмет простенький OLED RET012864E/REX012864J я такой приобретал в фирме “Гамма-Украина”, описание можно … Toyota Auto Fader – Модуль включения усилителяViews: 2126 Toyota Auto Fader – Модуль включения усилителя. Часто автолюбители прибегают к замене штатного головного устройства на универсальное мультимедийное, в котором значительно расширены функциональные возможности. Если возникает желание оставить …
Toyota Auto Fader – Модуль включения усилителяViews: 2126 Toyota Auto Fader – Модуль включения усилителя. Часто автолюбители прибегают к замене штатного головного устройства на универсальное мультимедийное, в котором значительно расширены функциональные возможности. Если возникает желание оставить … MPLAB X IDE – управление проектамиViews: 1211 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора …
MPLAB X IDE – управление проектамиViews: 1211 Среда MPLAB X IDE позволяет оперативно работать с несколькими проектами, например, если у вас в работе несколько проектов: Для того чтобы переключиться достаточно выбрать другой проект: Для выбора … Применение typedef, struct и unionViews: 8922 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ …
Применение typedef, struct и unionViews: 8922 Полезные описания переменных Часто необходимо в памяти расположить последовательно разные виды данных, что бы потом можно было их использовать. Полезные ссылки Взято и переработано с сайта http://www.butovo.com/~zss/cpp/struct.htm http://cppstudio.com/post/9172/ … Гаджеты для домашней автоматики – Емкостной сенсорViews: 1831 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …
Гаджеты для домашней автоматики – Емкостной сенсорViews: 1831 Управление светодиодным освещением – Сенсор емкостной. Данный гаджет предназначен для управления освещением где необходимо включением освещение сенсорным прикосновением. Датчик позволяет управлять светодиодной нагрузкой в виде модулей или светодиодных лент …