Views: 1309
Шестнадцати канальный драйвер светодиодов с 16-битным ШИМ,
максимальная тактовая частота 25 мГц.
Расположение выводов
DM632

DM634
Разницы в схемах подключения драйверов нет.
Основные различия
DM632
Управление глобальной яркостью, только через вход REXT, контроль обрыва светодиода.
DM634
Дополнительный регистр управления глобальной яркостью (резистором задается уровень тока в 75%). Режим защиты от перегрева. Контроль обрыва или замыкания светодиода.
Особенности драйвера
- Постоянный ток выходов: 5 мА до 90 мА регулируется одним внешним резистором.
- 16-битный линейный ШИМ выходы для каждого канала.
- Максимальное выходное напряжение: 17V.
- Максимальная тактовая частота: 25MHz.
- Выбор внутреннего или внешнего генератора тактовой частоты для ШИМ.
- Частота обновления ~ 275Hz при работе от внутреннего генератора ~ 18 МГц.
- В режиме реального времени обнаружение обрыва цепи светодиодов.
- Корпус и назначение выводов (за исключением QFN32) совместимы с драйверами светодиодов серии (ST2221C, DM134/5/6, DM13C).
- Напряжение питания: 3,3 В до 5,5 В.
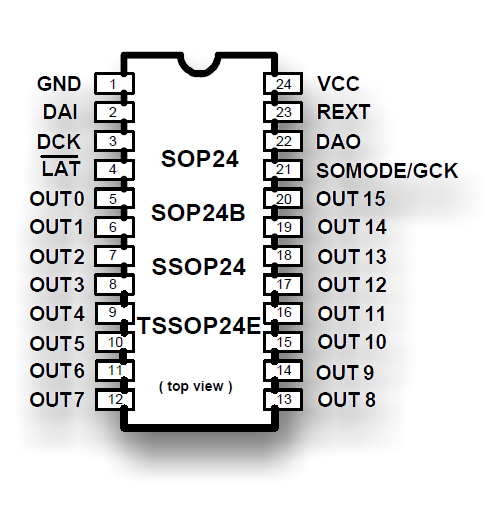
Назначение выводов корпус SSOP24
| Номер вывода | Название вывода | Функция |
| 1 | GND | Общий – питание драйвера. |
| 2 | DAI | Последовательный вход данных. |
| 3 | DCK | Вход синхронизации данных. Данные синхронизируются по переднему фронту DCK. |
| 4 | LAT | Вход управления загрузкой данных в драйвер для индикации. ‘H’ – режим приема-передачи данных, данные “прогоняются сквозь” драйвер, ‘L’ – загрузка данных из регистра приема в регистр индикации (регистр защелку) драйвера. |
| 5-20 | OUT0~15 | Выходы каналов управления светодиодами (открытый исток-драйверы постоянного тока). |
| 21 | SOMODE/GCK | Выбор режима вывода последовательных данных (SOMODE): ‘H’ – выходные данные DAO синхронизированы по заднему фронту DCK, ‘L’: выходные данные на выводе DAO, синхронизированы по переднему фронту DCK. Не подключен (GCK): Входной терминал для работы c тактовой частотой от внешнего генератора. |
| 22 | DAO | Последовательный выход данных. |
| 23 | REXT | Внешний резистор подключается между REXT и GND для задания тока светодиодов. |
| 24 | VCC | Напряжение питания драйвера. |
Некоторые особенности при конструировании печатной платы.
Для задания тока стабилизации используется подключение внешнего резистора между контактом REXT и землей. Если возникнут какие-либо проблемы в цепи контакта REXT, постоянный выходной ток может быть нестабильным. Выводы REXT (pin23), DAO (pin22), и SOMODE / GCK (pin21) находятся рядом друг с другом. Наиболее возможные помехи, могут быть вызваны от сигналов DAO или SOMODE / GCK сигнала внешнего генератора тактовой частоты. Соответственно, рекомендуется, чтобы добавить некоторые защитные площадь в указанных контактов в разводке платы, или выполнить проводку сигнальной линии к этим контактам на различных слоях печатной платы, что позволит эффективно предотвратить проблемы с помехами на наводимыми на контакт REXT.
Основные особенности на которые необходимо обратить внимание это напряжение на выходе токовых драйверов. т.к. токовые ключи выполнены в по схеме токового зеркала, и имеют открытые стоки, то напряжение на отрытом ключе должно быть по рекомендациям производителя в диапазоне от 1,0 до 0,5*Vss. Для работы без превышения температурного порога необходимо чтобы оно как модно ближе было к 1 вольту!
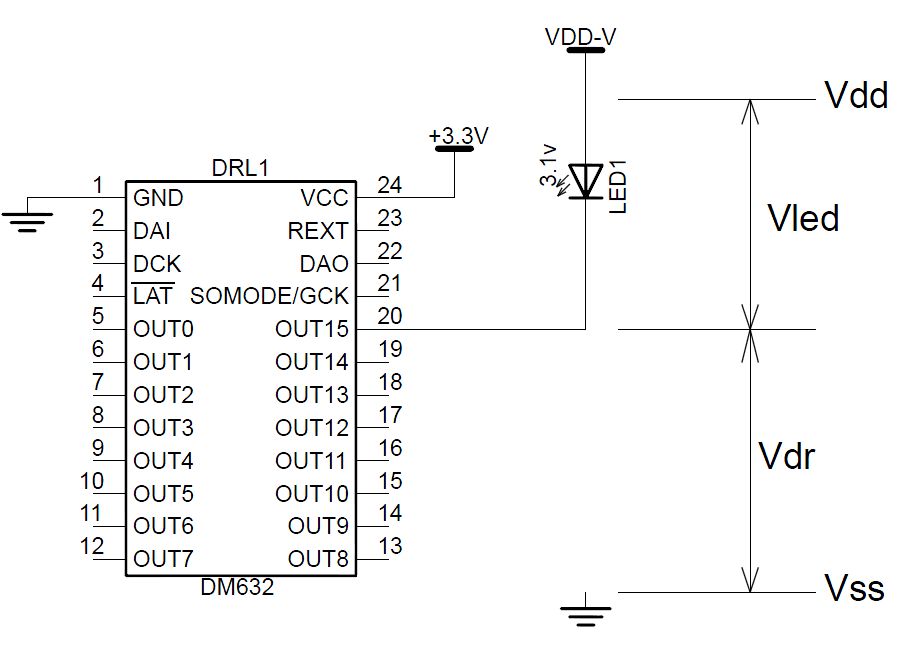
Напряжение на Vdr не должно быть выше 0,5*Vss, а лучше чтобы было 1 вольт. И в итоге все ограничения накладываются на общую рассеиваемую мощность корпуса драйвера. Например, если напряжение питания светодиодов Vdd = 5 вольт, а используется синий светодиод с паданием (по паспорту) 3,1 вольта при токе 20 мА, то на драйвере будет Vdr=5 – 3.1=1.9 вольта. Это в допустимом пределе, но учтите, что это в 2 раза выше чем необходимо. Можно еще уменьшить рассеиваемую мощность, если Vdr понизить до 1,0 вольта. Для этого питание для светодиода надо уменьшить до 4,1-4,2 вольта. Таким же принципом надо руководствоваться, если в цепи драйвера стоит цепочка светодиодов. Надо так подбирать напряжение питания, чтобы на светодиодах падало все напряжение минус 1,2-1,3 вольта. Самое главное в конструкции добиться того, чтобы при максимальной световой мощности падение на драйвере не упало ниже 1.0 вольта, если будет ниже нарушется режим стабилизации и ток упадет.
Выходы каналов постоянного тока DM632.
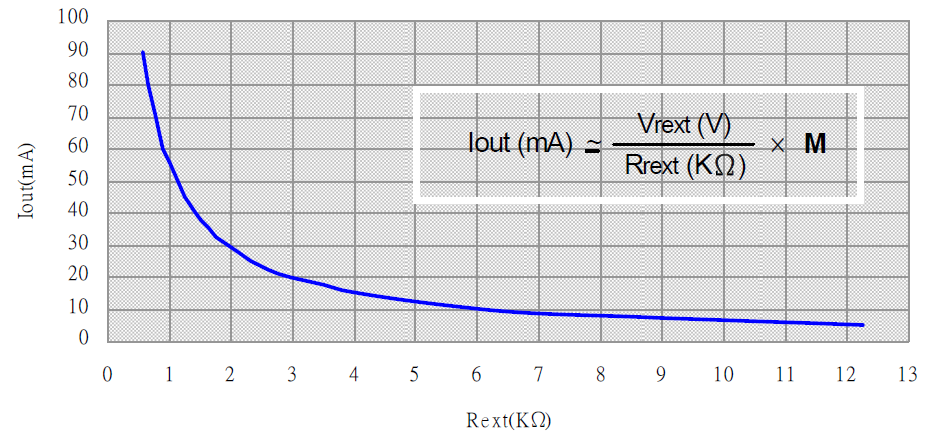
Постоянный ток значением (Iвых) каждого канала задается внешним резистором подключенным между выводом REXT и GND. Ток может быть установлен от 5 мА до 90 мА. Опорное напряжение REXT вывода (Vrext) составляет примерно 1,23 вольта. Значение выходного тока рассчитывается по следующей формуле:
| Iout(ma) | 5 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 |
| M | 50.86 | 48.60 | 48.39 | 47.66 | 46.97 | 46.13 | 44.74 | 43.94 | 43.20 | 42.24 |
Функция выходного тока от сопротивления токозадающего резистора REXT:
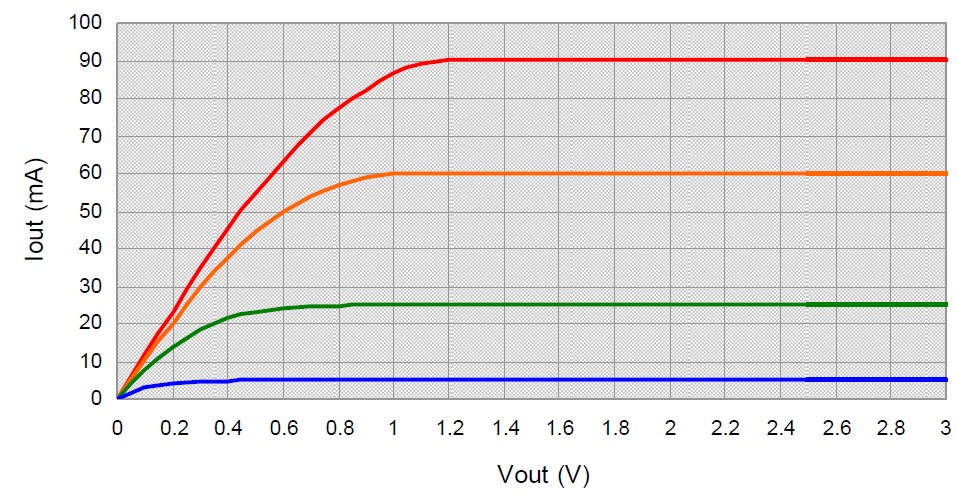
Функция выходного тока от напряжения на выходе драйвера тока (Vdr), по диаграмме видно, что стабилизация тока начинается c напряжения от 1,0 вольт и выше. Можно решить, что чем больше тем лучше, но надо учитывать, что при этом возрастает рассеиваемая мощность на самой микросхеме. Т.е. она будет все больше разогреваться, чем выше напряжение на выходе токового ключа канала.
Выходы каналов постоянного тока DM634.
Постоянный ток значением (Iвых) каждого канала задается внешним резистором подключенным между выводом REXT и GND. Ток может быть установлен от 5 мА до 70 мА. Пользователь может значением регистра GBC увеличить Iout до 90mA. Опорное напряжение REXT вывода (Vrext) составляет примерно 1,23 вольта. Значение выходного тока рассчитывается путем по следующей формуле:
| Iout(ma) | 5 | 10 | 20 | 30 | 40 | 50 | 60 | 70 |
| M | 41.13 | 39.35 | 36.78 | 35.09 | 33.75 | 32.53 | 31.35 | 30.09 |
Функция выходного тока от сопротивления токозадающего резистора REXT:
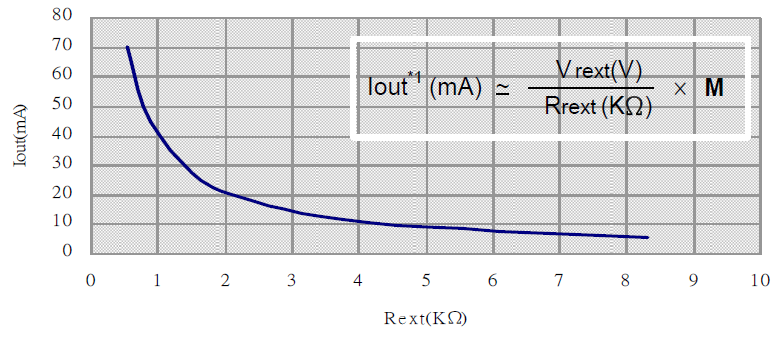
Диаграмма для определения максимальной производительности драйвера по выбору минимального напряжения на выходе каналов.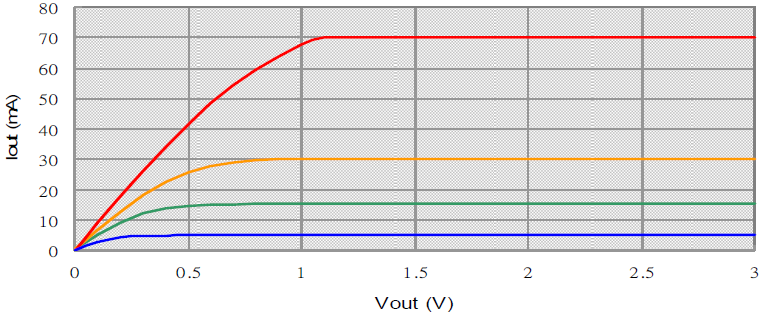
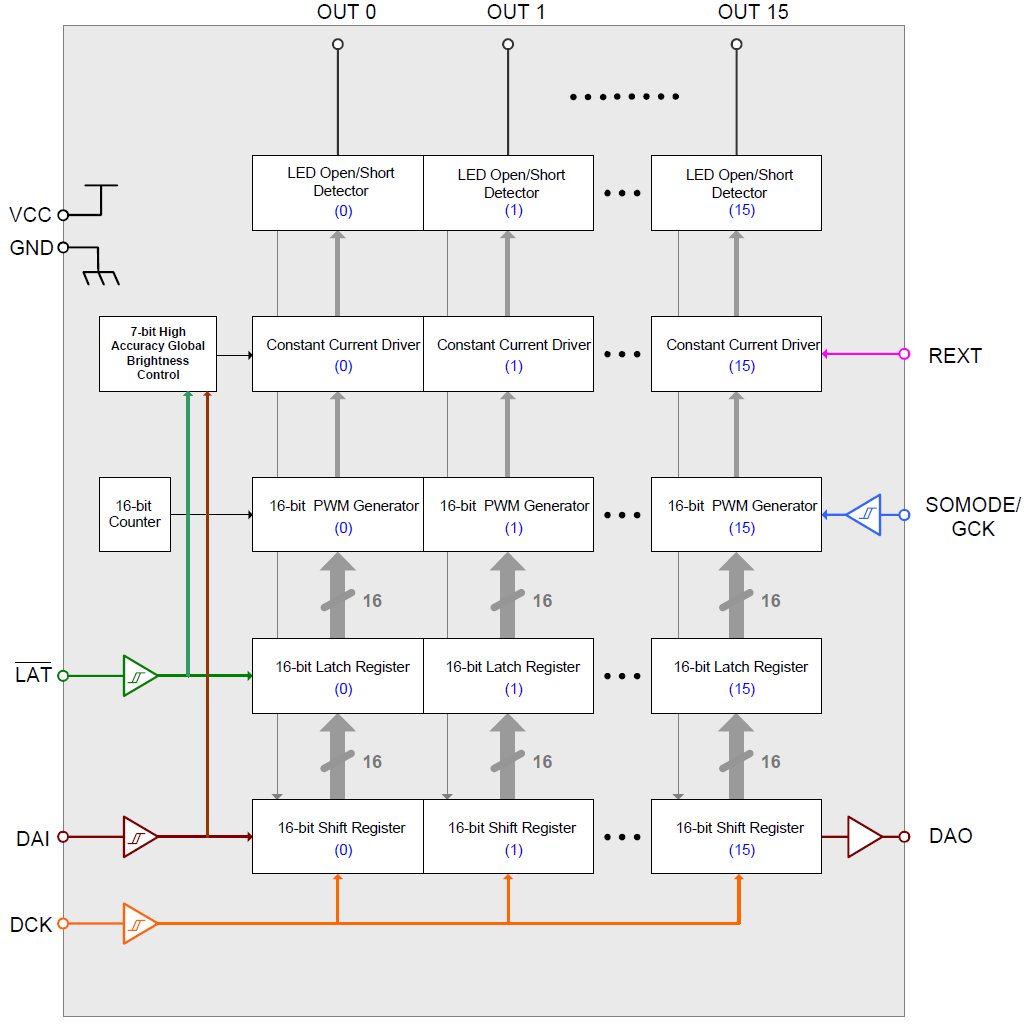
Последовательный интерфейс данных
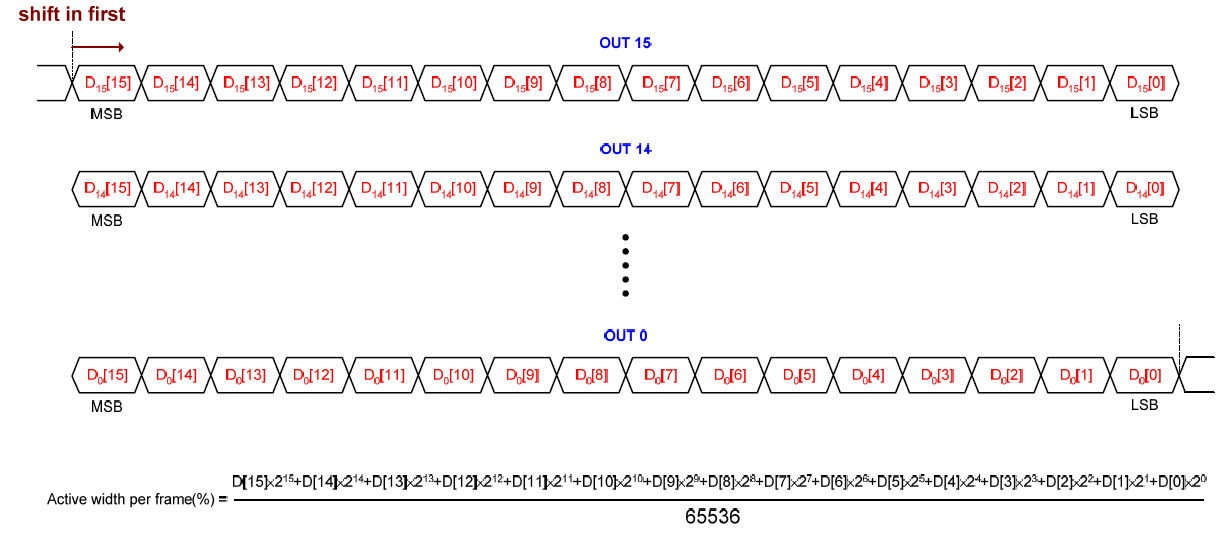
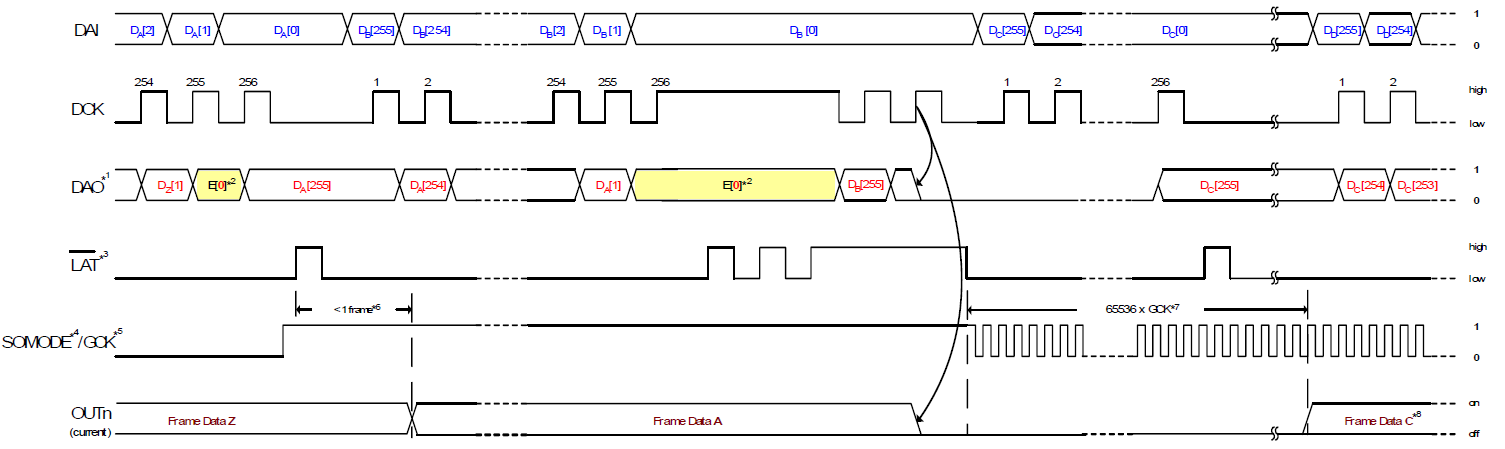
Входные данные (DAI) представляют собой пакет из 16 × 16 бит. Загружаются в регистр сдвига и синхронизированы на переднему фронту импульсов (DCK). Эти данные будут загружены в регистр защелки драйвера когда сигнал строба (LAT=1) установиться в высокий уровень, если (LAT=0) режим загрузки данных в регистр сдвига драйвера. Импульс загрузки данных из регистра сдвига в регистра защелку должны быть выполнено после заднего фронта последнего тактового импульса в пределах одного байта данных. Триггера последовательного тактового сигнала, из данных (DAO) будет смещен на синхронизацию с передним фронтом тактовых импульсов, если OUT (SOMODE) сохраняется на низком уровне. И если (SOMODE) поддерживается на высоком уровне, последовательный выход данных (DAO) будет смещен на синхронизации по заднему фронту тактового импульса (DCK).
Формат входных данных
Обнаружение обрыва светодиода
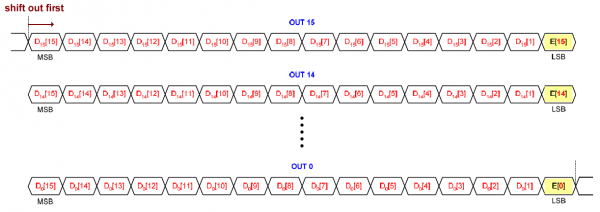
DM632 обеспечивает в режиме реального времени функцию контроля обнаружения обрыва в цепи светодиода. Обрыв будет диагностирован, когда выход включен, а выходное напряжение ниже 0.3V. Результат теста каждого канала будет записать в свой свой бит в регистр сдвига, который находится в LSB позиции (D15 [0] D14 [0], …., D0 [0]). См. на рисунке ниже, формат выходных данных. Информация о состоянии цепей светодиодов может быть извлечена из последовательности выходных (DAO) данных. Если младшие разряды считываются как ‘1 ‘, то это говорит, что индикатор в нормальном состоянии. Но если был получен ‘0 ‘, это говорит, что в цепи соответствующего светодиода произошел обрыв.
Формат выходных данных DM632
Формат выходных данных DM634
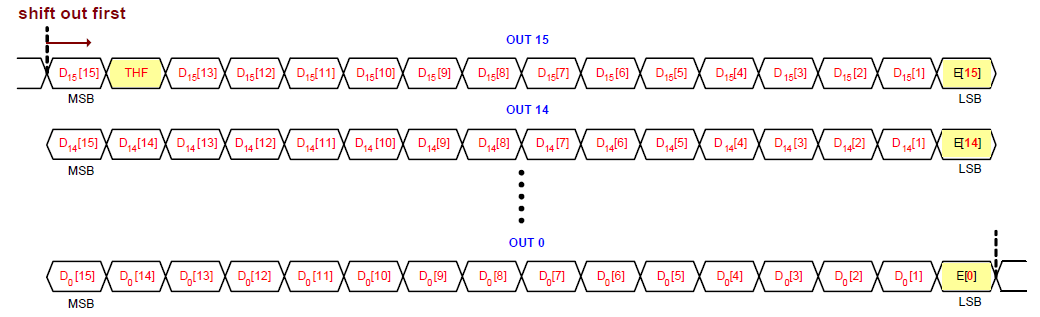
E15-E0– данные об повреждении цепи светодиода 1 – нет повреждения, 0 – повреждение, THF – бит аварии перегрева драйвера, для DM634.
Выбор внутреннего или внешнего генератора тактовой частоты.
Режимом работы по умолчанию является внутренний тактовый генератор, он автоматически подключен после подачи питания. Пользователь может переключаться от внутреннего к внешнему источнику тактовой частоты выполнив следующую регламентную последовательности.
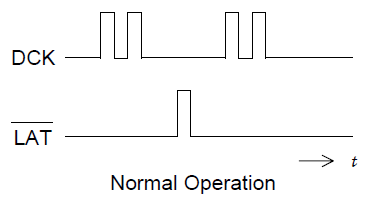
Нормальный режим работы драйвера, по синхроимпульсам DCK загружаются данные в регистр сдвига, импульсом LAT загружаются данные в регистр защелку.
Вариант 1 – переключение на внешний тактовый генератор
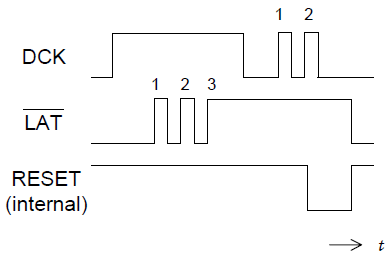
Исходное положение низкий уровень сигнала на шинах (LAT) и (DCK). (DCK) переводиться в высокий уровень. Затем на шине (LAT) формируются три передних фронта и (LAT) устанавливается на высоком уровне. Затем на шине (DCK) формируются два два передних уровня, по окончанию второго импульса на шине (DCK) формируется внутренний сброс. После установки низкого уровня на шинах формирование внутреннего сброса заканчивается. После этого можно подавать на вход SOMODE/GCK тактовые импульсы от внешнего тактового генератора.
Последовательность для переключения на внешний тактовый генератор (GCK).
Вариант 2 – переключение на внутрений тактовый генератор
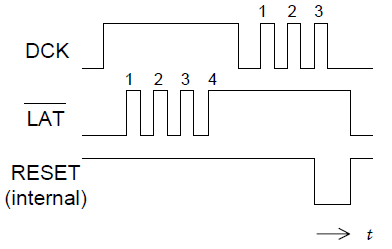
Исходное положение низкий уровень сигнала на шинах (LAT) и (DCK). (DCK) переводиться в высокий уровень. Затем на шине (LAT) формируются четыре передних фронта и (LAT) устанавливается на высоком уровне. Затем на шине (DCK) формируются три передних уровня, по окончанию третьего импульса на шине (DCK) формируется внутренний сброс. После установки низкого уровня на шинах формирование внутреннего сброса заканчивается.
Обратите внимание, что когда внутренний сброс на низком уровне, все регистры сдвига в DM632 будет очищены (на низкой уровня) и все выходы стабилизатор тока будет немедленно выключены.
Последовательность для переключения на внутренний тактовый генератор.
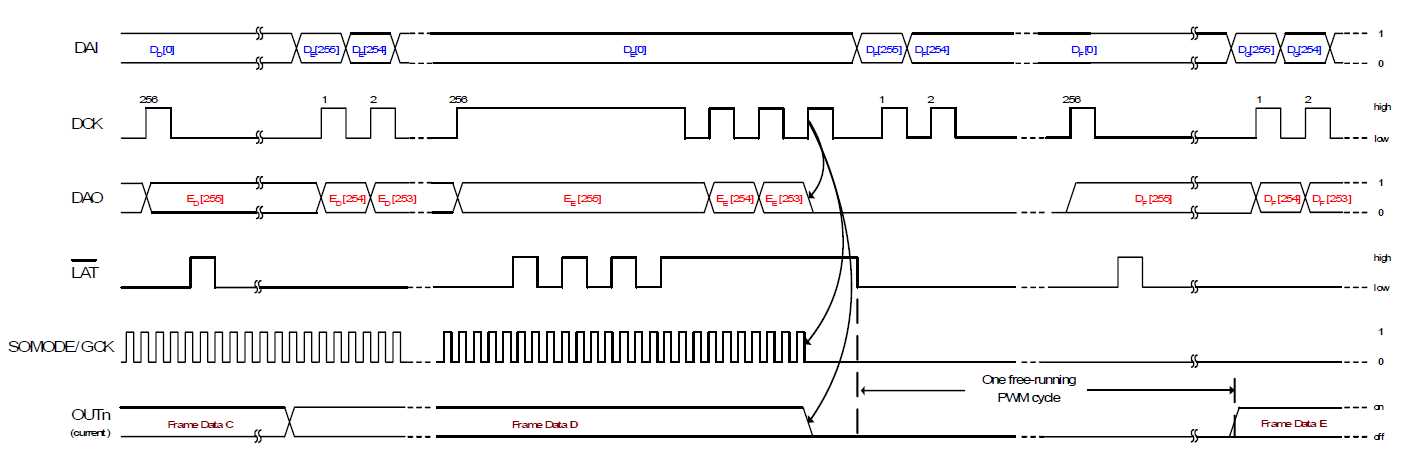
Временные диаграммы
DCK-DAI, DAO (SOMODE = “L” в режиме внутреннего или внешнего GCK)

DCK, DAO (SOMODE = “H” внутренний генератор)
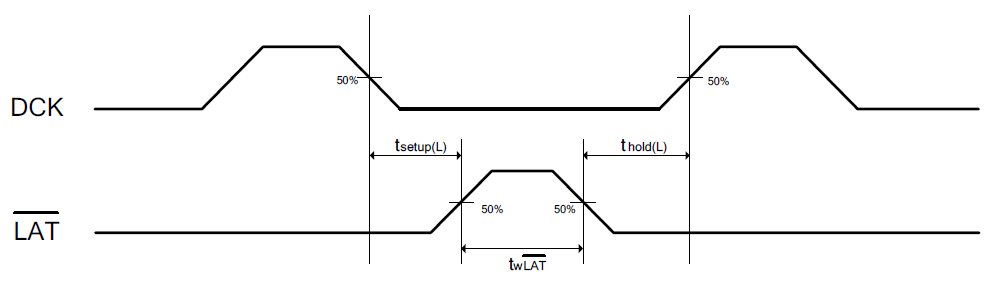
DCK-LAT – загрузка данных в регистр защелку
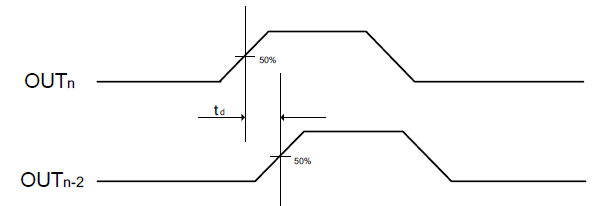
Время задержки межу входом и выходом для Unit (п = 2,3,4,5,6,7, 10, 11, 12, 13, 14, 15)
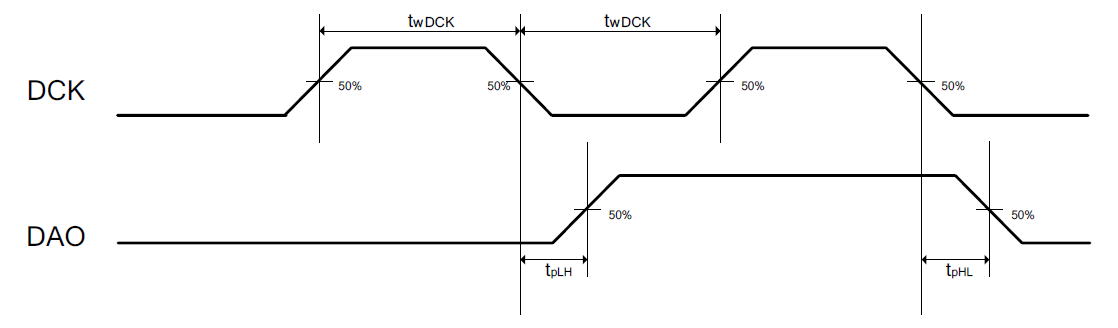
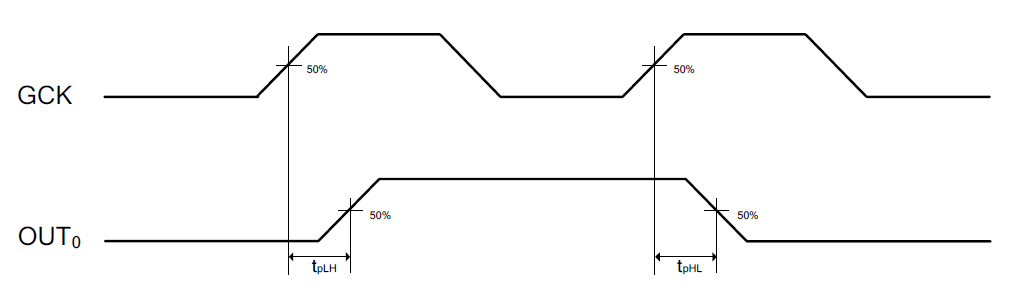
GCK-OUT0 задержка сигнала на выходе драйвера, от тактового сигнала
Временная диаграмма (автономном режиме переключатель в режим внешнего GCK)
Временная диаграмма (внешний переключатель режима GCK в автономном режиме)
Техника модуляции мощности
DM632 обеспечивает новую технику формирования световой мощности светодиодов. Он совмещает в себе традиционный импульсный метод модуляции (ШИМ), формируемых в младших (LSB) 12 бит и функция Сплит (SSM) представлена 4 старших бит (MSB). Основные преимущества SSM должна управлять светодиодными с эквивалентном высокой частоты обновления (до 380 Гц в DM632 при внешней тактовой частоте FGCK = 25 МГц) он позволяет более гладко измерять яркость. Отношения между PWM и SSM во временной области можно обратиться к диаграмме (не в масштабе) см. ниже:
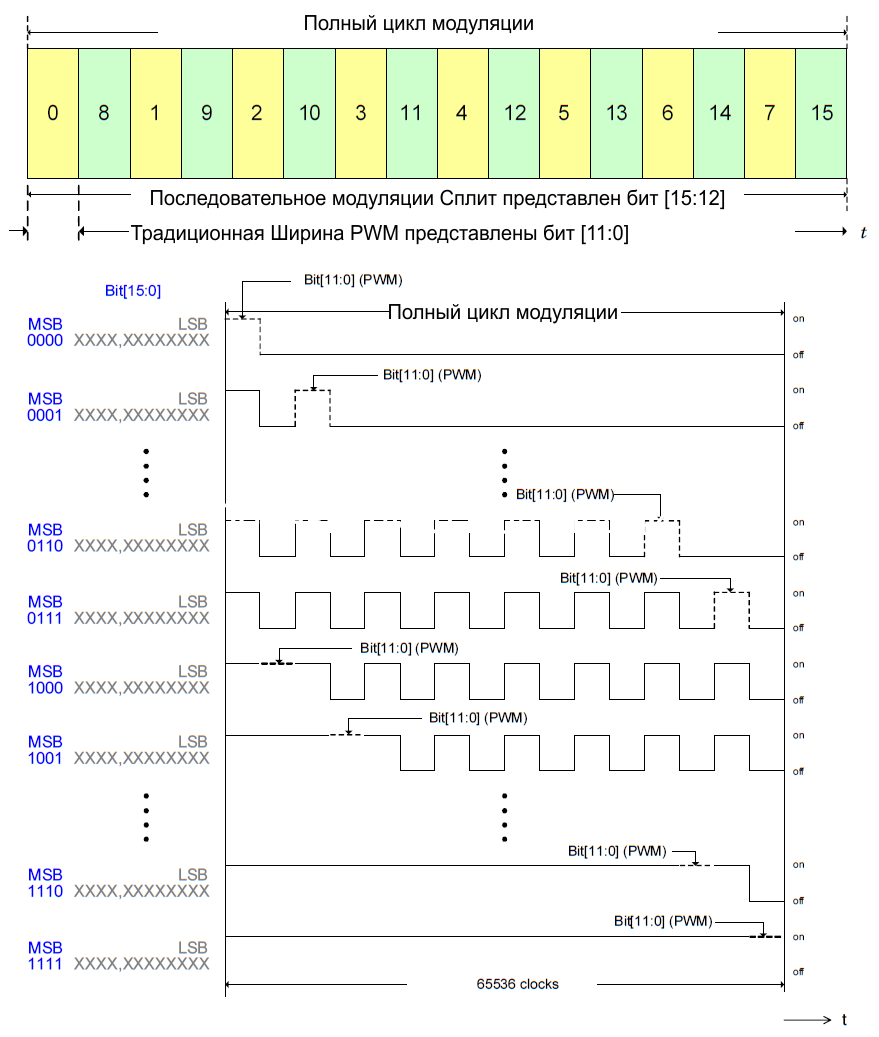
В зависимости от старших 4 бит ШИМ-яркость формируемая 12 младшими битами располагается в определенных местах полного цикла, что формирует более гладкую световую кривую яркости.
Глобальное цифровое управление яркостью (GBC) в DM634
DM634 имеет встроенный регистр коррекции общей яркости яркости. Выходной ток можно расчитать по следующему уравнению

Формат данных регулировки общей яркости и флаг Open/Short.
Управляющая последовательность данных GBC данных и флага управления обнаружением повреждения светодиода:
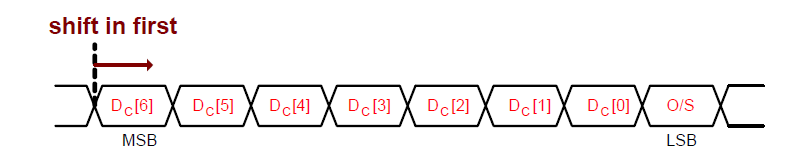
Dc[6], Dc[5] до Dc[0] являются 7-битными данные GBC значения. Последний бит O/S является флаг обнаружения. Когда O/S сброшен “L”, выбрана функция обнаружения обрыва светодиодов. В противном случае, если флаг установлен “H”, выбрана функция обнаружения короткого замыкания светодиода.
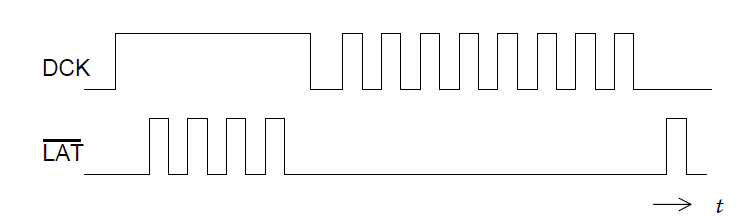
Управляющая последовательность.
По умолчанию данные GBC установлены в “1011111” (Iн = 75% Imax) после включения питания. Для регулировки общей яркости GBC необходимо выполнить определенную последовательность, см. рисунок ниже. При передачи данных общей яркости, данные в регистрах яркости каждого канала драйвера не нарушаются. Запуск последовательности начинается с переводом шины DCK в высокий уровень, далее необходимо выполнить четыре импульса на шине (LAT с высоким уровнем DCK), после этого вход данных переключается к регистру GBC (по спадающем фронте 4-го импульса защелки LAT). Далее можно в обычном режиме передать байт данных, где первые 7-бит установка общей яркости GBC данных и флага O/S.
Обратите внимание, что PWM данные не будут изменены во время загрузки данных GBC.
Это краткое описание, более подробно читайте в фирменной документации. Эти драйверы были выбраны мной как основа для построения выходного оптического устройства (ВОУ) для светомузыки.
Файлы для загрузки DM632 – описание – En[wpdm_file id=150 template=”link-template-calltoaction3.php”] DM634 – описание – En[wpdm_file id=151 template=”link-template-calltoaction3.php”]
Это может быть интересно
 Простой цифровой регулятор мощностиViews: 7844 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью …
Простой цифровой регулятор мощностиViews: 7844 Простой регулятор мощности с цифровой индикацией. Этот проект создан как обучающий, для ознакомления с основами построения сетевых регуляторов мощности. Устройства подобного типа можно использовать для управления освещением, скоростью … Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 554 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V24.0 PROViews: 554 Назвемо цей варіант поновлення для професіоналів і не тільки. Що нового? 1. Повністю змінено структуру параметрів бази даних компонента. Це дозволило повноцінної роботи Актив ВОМ. Ви відразу отримуєте … Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.04Views: 469 Смотри как установить и подключить библиотеку тут. V. – 23_04 – Component Database Update. – configuration file name – DXPPreferences1.DXPPrf. – Added two projects for audio amplifier …
Altium Designer my Libraries, Project templates, System settings by Catcatcat V23.04Views: 469 Смотри как установить и подключить библиотеку тут. V. – 23_04 – Component Database Update. – configuration file name – DXPPreferences1.DXPPrf. – Added two projects for audio amplifier … Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля …
Простой цифровой милливольтметр постоянного токаViews: 4230 Простой цифровой вольтметр постоянного тока. Три диапазона измерений с автоматическим переключением 1 – 0,001 – 0,999 V, 2 – 0,01-9,99 V, 3 – 0,1-99,9. Четыре управляемых выхода с возможностью задания функции контроля … Мультизоновый индикатор-терморегулятор ch-c3010Views: 1396 Часто возникает необходимость получить информацию по температуре с множества точек контроля. Вам необходимо знать температуру в комнате, в коридоре, температуру на улице, а в погребе (или на балконе) …
Мультизоновый индикатор-терморегулятор ch-c3010Views: 1396 Часто возникает необходимость получить информацию по температуре с множества точек контроля. Вам необходимо знать температуру в комнате, в коридоре, температуру на улице, а в погребе (или на балконе) … AD9833 – Programmable Waveform GeneratorViews: 3085 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 3085 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … OLED RET012864E/REX012864JViews: 1606 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как …
OLED RET012864E/REX012864JViews: 1606 RET012864E/REX012864J ОЛЕД индикатор производитель Raystar-Optronics приобретался в http://www.microchip.ua/ к сожалению никакой информации на сайте поставщика нет. Поэтому решил работу с этой версией индикатора на драйвере SSD1305 предоставить на своем сайте. Так как … PIC18 – модуль DMAViews: 1366 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки …
PIC18 – модуль DMAViews: 1366 Введение Модуль прямого доступа к памяти (DMA) предназначен для обслуживания передачи данных непосредственно между различными областями памяти без вмешательства процессора. Исключив при этом необходимость в интенсивной обработки … Дисплей KD035C-3A подключение и управлениеViews: 890 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеViews: 890 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … ch-4000 – универсальная печатная платаViews: 1153 На смену устаревшей плате ch-3000, пришла новая ch-4000. Плату уже можно приобрести в магазине Ворон. Схема. Плата позволяет создавать таймеры, часы реального времени, регуляторы температуры, регуляторы влажности, вольтметры, …
ch-4000 – универсальная печатная платаViews: 1153 На смену устаревшей плате ch-3000, пришла новая ch-4000. Плату уже можно приобрести в магазине Ворон. Схема. Плата позволяет создавать таймеры, часы реального времени, регуляторы температуры, регуляторы влажности, вольтметры, …