
Visits: 1725
Страница в pdf
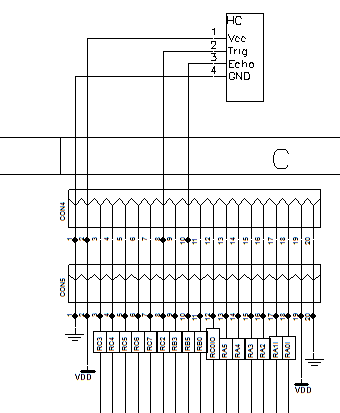
Ультразвуковой метод измерения расстояния является одним из самых распространенных. Ультразвуковой модуль HC-SR04 имеет 4 вывода.
 Vcc – напряжение питания 5 вольт
Vcc – напряжение питания 5 вольт
Trig – вход запускающих импульсов для процесса измерения
Echo – выход импульса длительность которого пропорциональна расстоянию.
GND – общий провод питания.
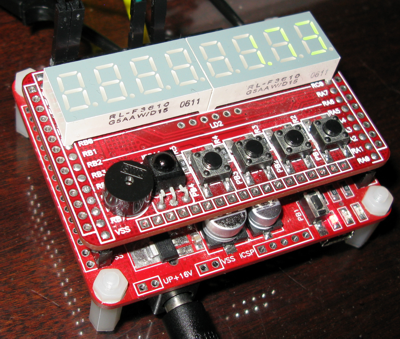
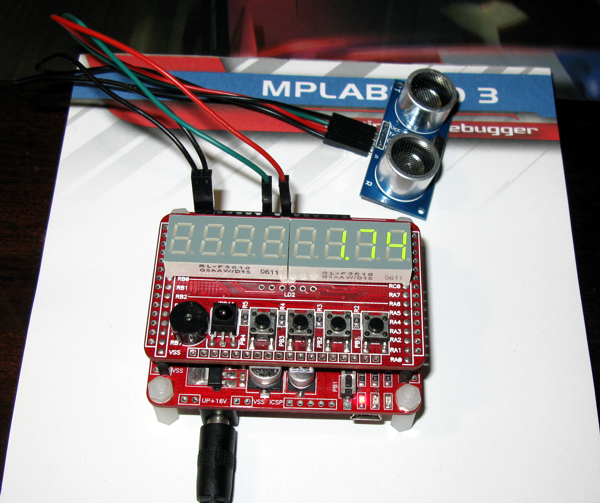
Для демо примера будем использовать плату ILLISSI-4B-03-primum и плату индикации ILLISSI-4С-01-secundo.
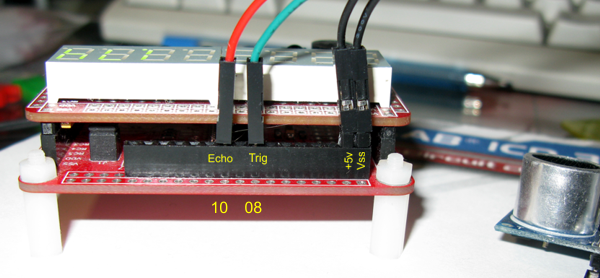
В качестве управления будем использовать вывод RC2, для измерения длительности будем использовать вход T1G (RB5). Подключение:
Для измерения частоты используется таймер 1 и его Gate-модуль управления.
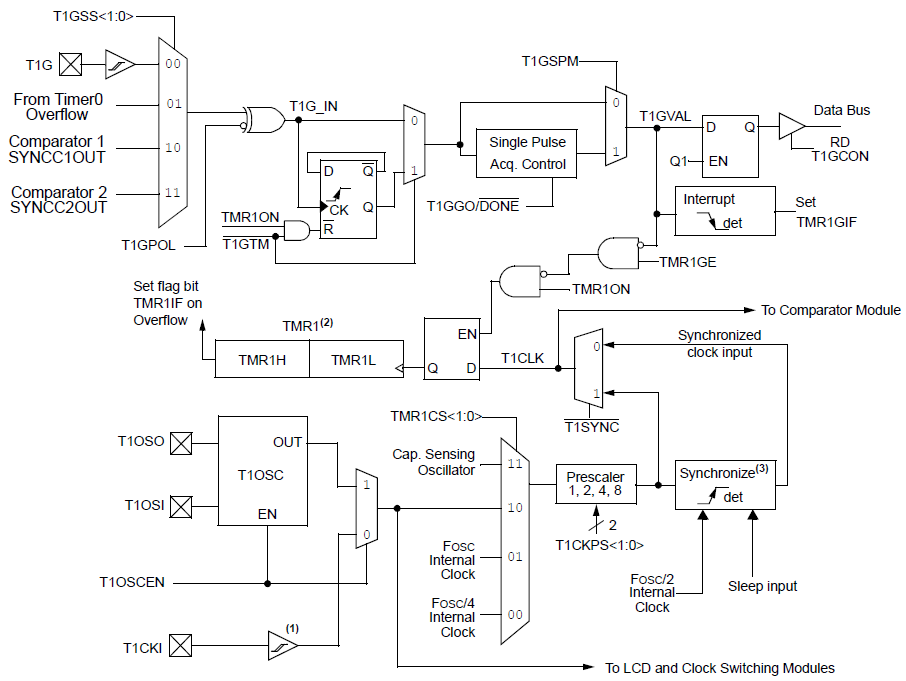
Gate-модуль управления появился в новых Pic-контроллерах серии PIC16F19xx. Теперь элементарно легко построить измерителей длительности и частоты сигнала, которые аппаратно, самостоятельно выполняют эти функции не отвлекая микроконтроллер от основной задачи.
Для измерения сигнала настроим таймер для измерение длительности импульсов. На вход будем подавать тактовую частоту 1 мГц. Что соответствует 1 мкс длительности. Измеряемый импульс (эхо от модуля HC-SR04) будем подавать на вход T1G.
T1CON=0b00110001; // настройка таймера T1CON
// |||||| |
// |||||| +-- TMR1ON таймер включить
// |||||+---- T1SYNC синхронизация отключена
// ||||+----- T1OSCEN генератор отключен
// ||++------ T1CKPS настройка предделителя 00 - 1:1
// ++-------- TMR1CS выбор тактовой частоты FOSC
T1GCON=0b11000100; // регистр ворот
// ||||||++-- T1GSS<1:0>: выбор входа для модуля ворот 00 - TGP1
// ||||||+--- T1GVAL: Флаг
// |||||+---- T1GSPM: выбор синхронизация от модуля единичного импульса
// ||||+----- T1GGO/DONE: запуск одиночного измерения
// |||+------ T1GSPM: управление триггером режима (отключен)
// ||+------- T1GTM: управление триггером режима (отключен)
// |+-------- T1GPOL: таймер 1 работает когда уровень высокий
// +--------- TMR1GE: регистр ворот включен и управляет таймером 1
Вариант настройки таймера выполнен с учетом, что тактовая частота контроллера 32 мГц. (хотя с успехом можно использовать и более низкие тактовые частоты от 1 мГц.).
Процесс измерения начинается с инициализации таймера и сброса флага переполнения таймера.
TMR1IF=0; // сброс флага переполнения TMR1H=0; // сброс регистров таймер TMR1L=0; //
Особенности работы модуля не соответствующие описанию.
Флаг переполнения будет использоваться для определения ситуации когда модуль HC-SR04 не может получить эхо. На практике было определено, что работа модуля немного отличается от описания, которое было найдено в инете. Дело в том что при отсутствия эха, модуль формирует непрерывный импульс.

Длительность импульса ответа непрерывна и прерывается только в момент формирования импульса запуска измерения. Вид на ответ от модуля в ситуации отсутствия эха.

Если эхо присутствует, то мы будем видеть следующие осциллограммы работы с модулем.

В начале формируется (на входе Trig) импульс запуска длительностью не менее 10 мкс. После этого модуль через 0,5 мс, начинает формировать ответ импульсом длительностью пропорциональной расстоянию. На нижнем рисунке, пример, формирования импульса (это расстояние от поверхности моего стола до потолка и составляет 1,74 м).

Длительность 10114 мкс. Что составляет 10114/58=174 см.
После инициализации регистров таймера и очистки флага переполнения, формируем импульс запуска длительностью не менее 10 мкс.
// формирование импульса запуска LATC2=1; __delay_us (10); LATC2=0;
После этого включаем таймер и запускаем режим измерения одиночного импульса.
TMR1ON=1; // включение таймера T1GGO=1; // запуск одиночного измерения
Далее ожидаем окончания измерения, при этот контролируем, флаг переполнения таймера и если такое “неподобство” наступит, будем подсчитывать количество таких измерений. Это необходимо, чтобы сделать индикацию отсутствия эха, приемлемой для восприятия.
while(T1GGO)// ожидания окончания измерения
{
CLRWDT(); // сброс сторожевого таймера
if(TMR1IF)
{
T1GGO=0;// останов измерения при переполнении таймера
ERROR++;// подсчет количества измерений когда отсутствует эхо
}
}
После выполнения измерения, останавливаем таймер:
TMR1ON=0;//остановить таймер
Далее по результатам измерения выводим на индикатор измеренное расстояние или сообщение, что нет эха, т.е. нет препятствий в зоне чувствительности модуля.
if(!TMR1IF)
{
// чтение регистров таймера
pwm_reg=TMR1L;
pwm_reg += TMR1H << 8;
// ФИЛЬТР устранения дрожания индикации при смене показаний "накапливающий интегратор"
if(pwm_reg^pwm_regp && porog)porog--;
else
{
pwm_regp=pwm_reg;
porog=2;
}
// преобразование в сантиметры длины
// bin_dec (pwm_reg/58,2); // индикации "не отфильтрованного" сигнала
bin_dec (pwm_regp/58,2);// индикация после фильтра
ERROR=0;
// индикация
indic (dmil,miln,stys,dtys,tysc,sotn,dest,edin,6); // вывод значения на дисплей
}
else
{
// индикация отсутствия эха
if(ERROR>4)indic (cM,cn,co,0,cE,ch,co,cM,0); // вывод значения на дисплей
}
Примечание: для устранения “дрожания” показаний применим «накапливающий интегратор». За это отвечают строки:
// ФИЛЬТР устранения дрожания индикации при смене показаний "накапливающий интегратор"
if(pwm_reg^pwm_regp && porog)porog--;
else
{
pwm_regp=pwm_reg;
porog=2;
}
И в конце, сформируем задержку, которая необходима для формирования периода подачи импульсов изменения не менее чем через 50 мс.
__delay_ms (50);// формирования периода запуска сенсора
Выводы: Датчик обладаем широким углом захвата, поэтому его рекомендуется устанавливать над плоскими поверхностями на расстоянии не менее 10 мм. В связи с этим он захватывает отраженные импульсы от предметов которые находятся от его оси до ±15 грд., что необходимо учитывать при конструировании устройств. Реальная чувствительность не более 3 метров. На большие расстояния не хватает или мощности формируемого импульса или чувствительности приемника. Мое мнение – я считаю, что для таких модулей вывод измеряемого параметра в виде ширины импульса не практично, так-как получается два цикла измерения, первое это измерение делает модуль, второе контроллер. Для таких устройств желательно, что-бы все эти преобразования были выполнены в самом модуле. А на выходе формировать уже значение расстояния в виде готовых цифровых данных. А получать данные из модуля, удобно через последовательные интерфейсы I2C, SPI или UART.
Фото демо проекта
Видео демо проекта
__
Проект
Это может быть интересно
 Оптосимистор и его применениеVisits: 19410 Эрве Кадино “Цветомузыкальные установки” Ответ на вопрос – управление мощным тиристором или симистором, от терморегулятора. Статья в pdf[wpdm_file id=129 template=”link-template-calltoaction3.php”] Оптосимистор принадлежат к классу оптронов и обеспечивают очень хорошую …
Оптосимистор и его применениеVisits: 19410 Эрве Кадино “Цветомузыкальные установки” Ответ на вопрос – управление мощным тиристором или симистором, от терморегулятора. Статья в pdf[wpdm_file id=129 template=”link-template-calltoaction3.php”] Оптосимистор принадлежат к классу оптронов и обеспечивают очень хорошую … Acquaintance with audio-bluetooth modules F-6888 (BK3254).Visits: 2126 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, …
Acquaintance with audio-bluetooth modules F-6888 (BK3254).Visits: 2126 Для проектов появилось необходимость познакомиться с недорогими модулями китайского производства, которые можно приобрести у нас в Украине и у китацев, на алиэкспрессе. Так как меня интересует не просто, … Униполярный шаговый двигательVisits: 2146 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при …
Униполярный шаговый двигательVisits: 2146 В приводах различных устройств часто применяются шаговые двигатели, Шаговый двигатели различают двух типов униполярные – когда обмотки коммутируются током текущим только в одну сторону, например при … ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Visits: 2408 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств …
ch-4060 – регулятор температуры и влажности на датчике DHT11/DHT22/AM2302Visits: 2408 На плате ch-4000 очень легко собрать устройство регулятора температуры и влажности. Датчик DHT11 самый недорогой вариант для создания такого устройства, правда точность его не велика, но для бытовых устройств … Светодиоды со встроенным драйвером WS2812BVisits: 916 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery …
Светодиоды со встроенным драйвером WS2812BVisits: 916 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery … DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверVisits: 992 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети …
DIXELL XWEB500D-EVO + RUT900 или как пробить NAT-серверVisits: 992 Когда необходимо под какой нибудь контроллер имеющий вэб сервер в инет, то нужен статический IP, что оказалось проблемой при работе с операторами сотовых сетей, конкретно с оператором сети … 12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Visits: 805 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении …
12-BIT A/D CONVERTER WITH THRESHOLD DETECT на примере PIC24FJ128GA204Visits: 805 Введение. 12-битный модуль A/D Converter является усовершенствованной версией 10-битного модуля, предлагаемого на некоторых устройствах PIC24. Оба модуля являются преобразователями, в своих ядрах, с последовательным приближением (SAR), в окружении … ch-4050 – дифференциальный терморегуляторVisits: 1849 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя …
ch-4050 – дифференциальный терморегуляторVisits: 1849 ch-4050 – это не новая модель, это расширенная версия универсального терморегулятора ch-4000. Различия коснулись в появлении новой функции дифференциального регулирования. Это вид регулирования по разности температур измеренного двумя … Универсальный терморегулятор ch-c3000Visits: 2960 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Visits: 2960 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Модуль CAN в микроконтроллерах PIC18Visits: 5694 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …
Модуль CAN в микроконтроллерах PIC18Visits: 5694 Введение CAN последовательный интерфейс связи, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью. Протокол связи полностью определен Robert Bosch GmbH, в спецификации требований …