
Visits: 2059
Часть третья – копнём немного глубже.
Вы наверное заметили, что во второй главе, вроде сначала все шло как по маслу, а потом, что бы заморгали светики, я вставил в код программы три строки настройки таймера без какого на то объяснения, почему это так. В начале когда начинаешь, что-то новое нужен результат и мы его получили, нам необходимо, что бы светики заморгали, они моргают. Сразу возникает вопрос, неужели в MHC (теперь будем так обзывать MPLAB® Harmony Configurator) невозможно это сделать более правильным путем, ну во первых можно и нужно.
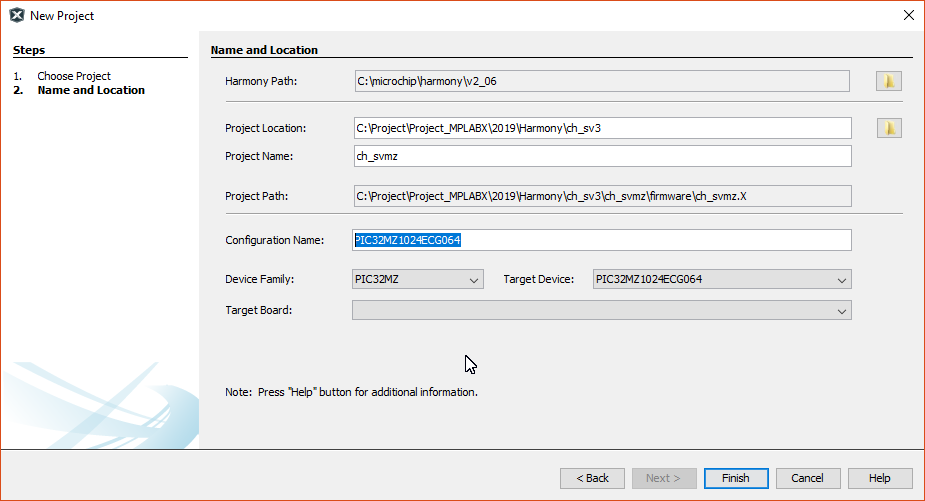
Для чистоты эксперимента пройдитесь ещё раз и создайте новый проект. Только при создании проекта добавьте имя конфигурации, рекомендую указать имя используемого микроконтроллера, это вам даст в будущем создавать проект под разные микроконтроллеры оперативно перенося их с одной на другую платформу, с одной конфигурации на другую.
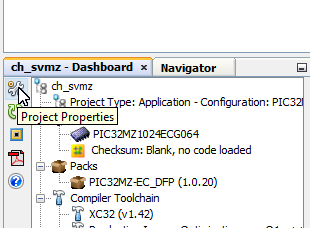
 Далее не забудем, добавить немного штрихов, идем в настройки проекта
Далее не забудем, добавить немного штрихов, идем в настройки проекта
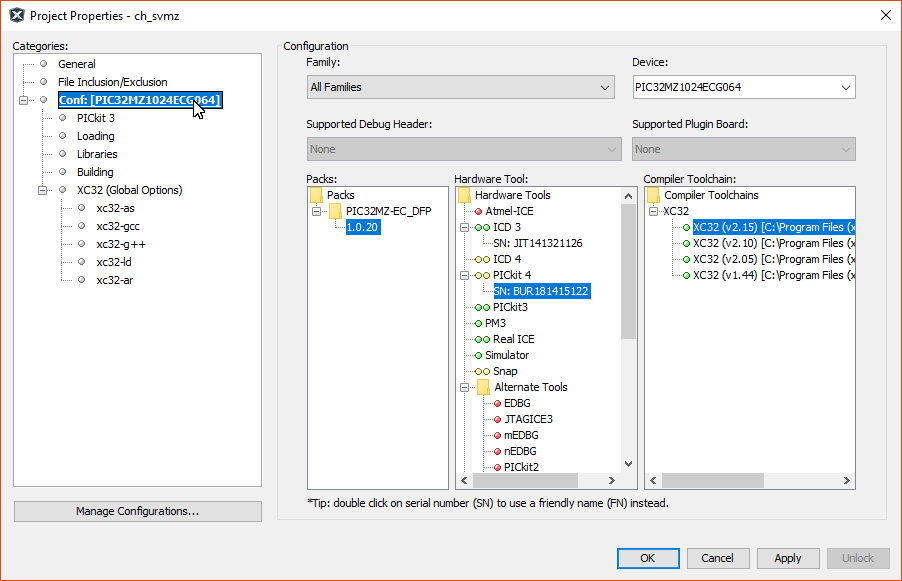
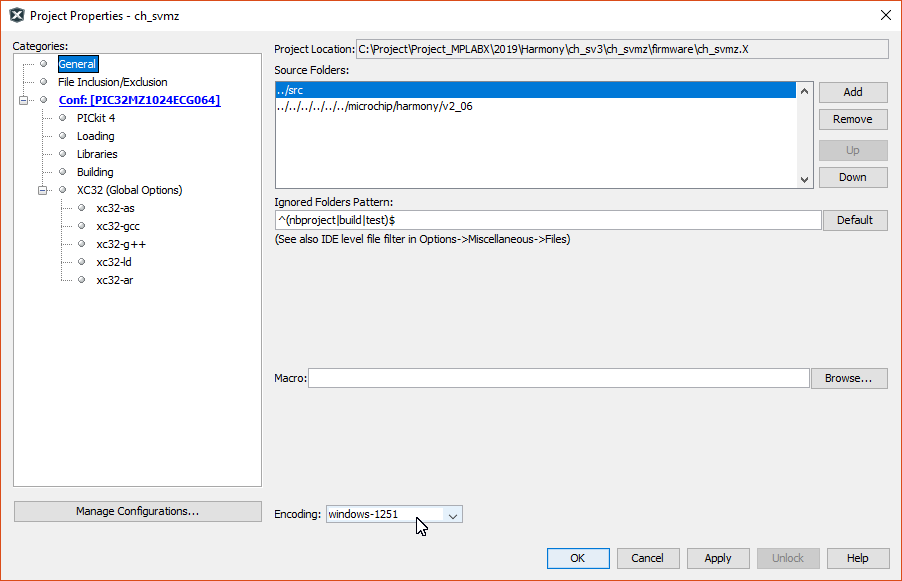
В разделе конфигурация, выберем железо для программирования (у меня PICkit4) выберем компилятор.
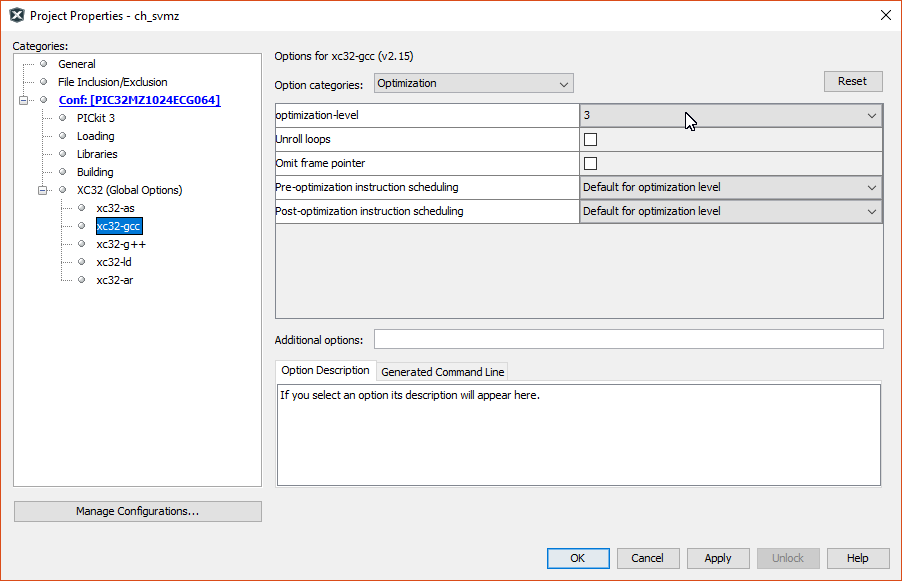
и если необходимо выберем режим оптимизации, хочу напомнить MHC всегда если не выбран уровень, будет компилировать проект с уровнем 1…
 И не забудьте войти в общие параметры и задать кодировку 1251.
И не забудьте войти в общие параметры и задать кодировку 1251.
 Теперь мы в MPLABX будем иметь следующее, пустой проект без каких либо файлов MCH будут автоматически запущен и ожидать наших действий.
Теперь мы в MPLABX будем иметь следующее, пустой проект без каких либо файлов MCH будут автоматически запущен и ожидать наших действий.

Что мы имеем на этом этапе? Закладки в конфигуратора:
- Options – Параметры – выбор различных параметров приложения в MPLAB Harmony.
- Clock Diagram – Настройка тактового генератора – показывает текущую конфигурацию системы формирования тактовых сигналов устройства.
- Pin Diagram – Интерактивная настройка выводов – предоставляет графический обзор того, как проект конфигурирует контакты устройства.
- Pin Settings – Конфигурирование выводов – Предоставляет сводную информацию о том, как настроены контакты устройства.
Начнем с конфигурации тактового генератора Clock Diagram.
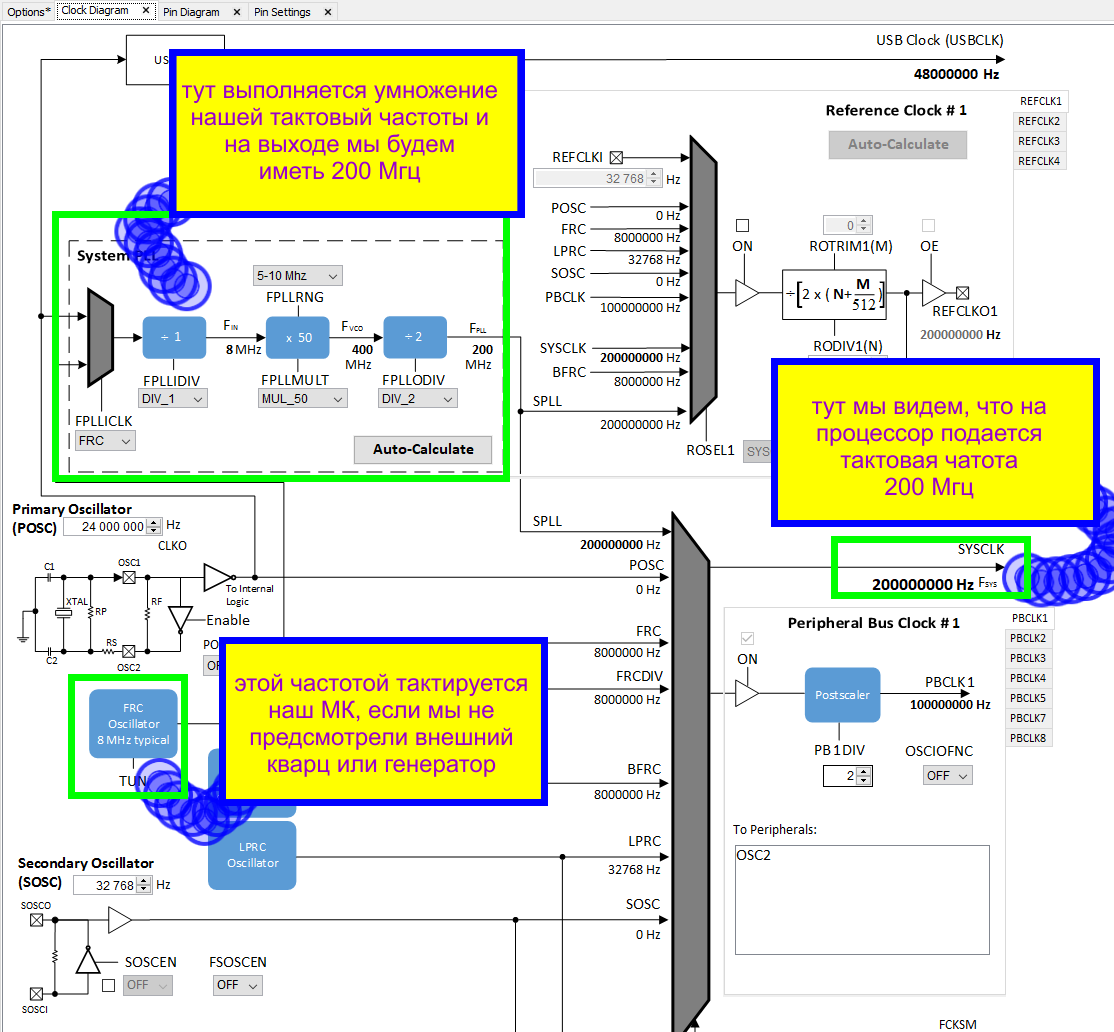
Сейчас у нас тактовая частота в настройка не нуждается, но можно для себя изменить параметры и вы увидите, как будут меняться значение величин. Что и ка настраивать будут изучать по мере необходимости. Но сейчас стоит обратить внимание на главное, у нас имеется источник частоты.
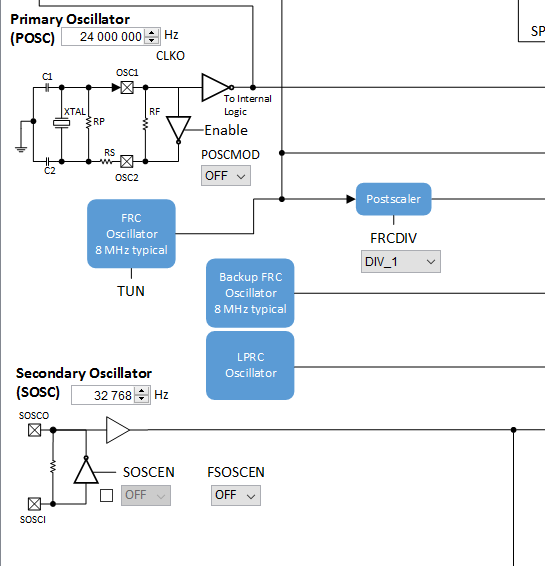
Мы видим тройка встроенных высокоточных генераторов, имеются два генератора для главного тактового генератора и для низкочастотного генератора. назовем так часового. В зависимости от наших потребностей мы можем выбрать от какого генератора нам управлять нашей системой, от этого будет зависеть и потребляемая мощность нашего устройства.
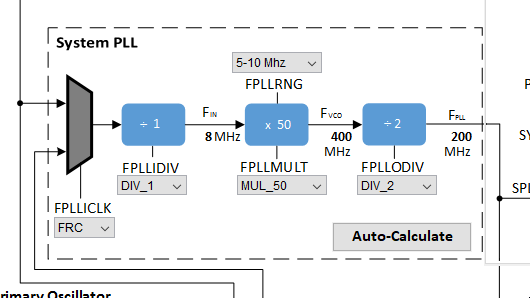
Умножитель частоты. Почему умножитель? В таком варианте мы получаем минимальное значение излучаемых паразитных помех от задающей частоты. В этом месте наша частота будут преобразована с 8 МГц до 200 МГц. Практически все МК легко работают на частотах 220-230 МГц, но есть и экземпляры которые легко работают и на 250 МГц.
Далее у нас имеется 4 блока для формирования опорных частот. Для чего это необходимо, мы можем управлять периферийными устройствами более гибко предоставляя им те частоты которые необходимы для управления нашими задачами. Если в семействе PIC16-18, а то и в 16 битным микроконтроллерах, нам например, для получения тактовой частоты для таймера, может не хватить предварительного делителя, то в PIC32 эта проблема решается легко. По клацайте по закладкам выбора модулей и вы увидите, для какой периферии вы можете изменить тактовую частоту.

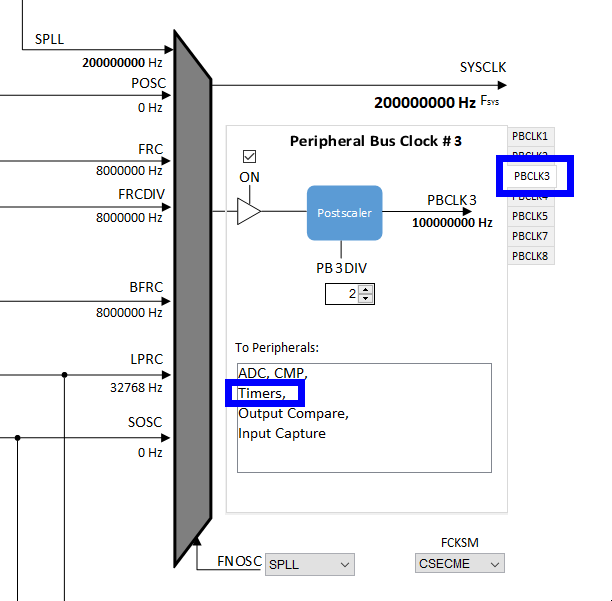
Далее мы имеем 8 модулей для настройки шины тактовой частоты уже конкретно периферии. Здесь также можно в окне увидеть для какой периферии будут выполнены изменения по тактовой частоте. Например модуль PBCLK3, затронет изменение тактовой частоты на входе таймеров.
так беглый ликбез по тактовому генератору мы прошли. По мере решения задач, мы постоянно будем возвращаться к тактовому генератору для изменения параметров системы под наши требования. Из всего мы только поняли, что процессор настроен на тактовую 200МГц, а периферия на 100МГц.
Перейдем в закладку Pin Diagram и повторим конфигурирование портов.
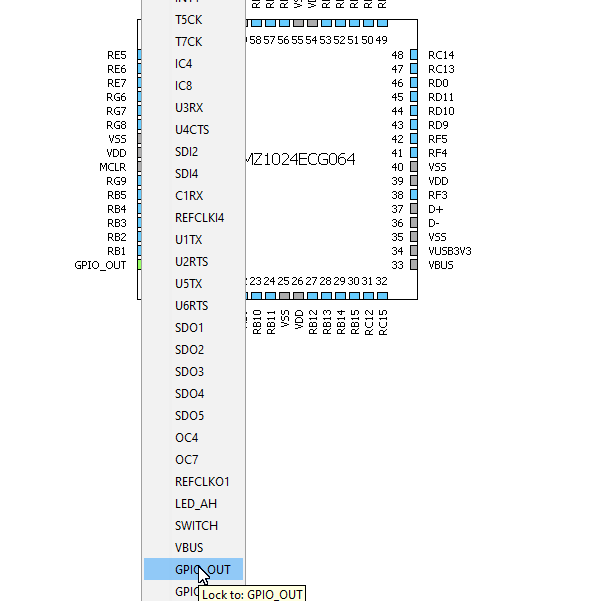
После настройки у нас должен быть вид, порты RB0 и RB1 настроены на выход.

Теперь выберем закладку Pin Settings и проверим настройки
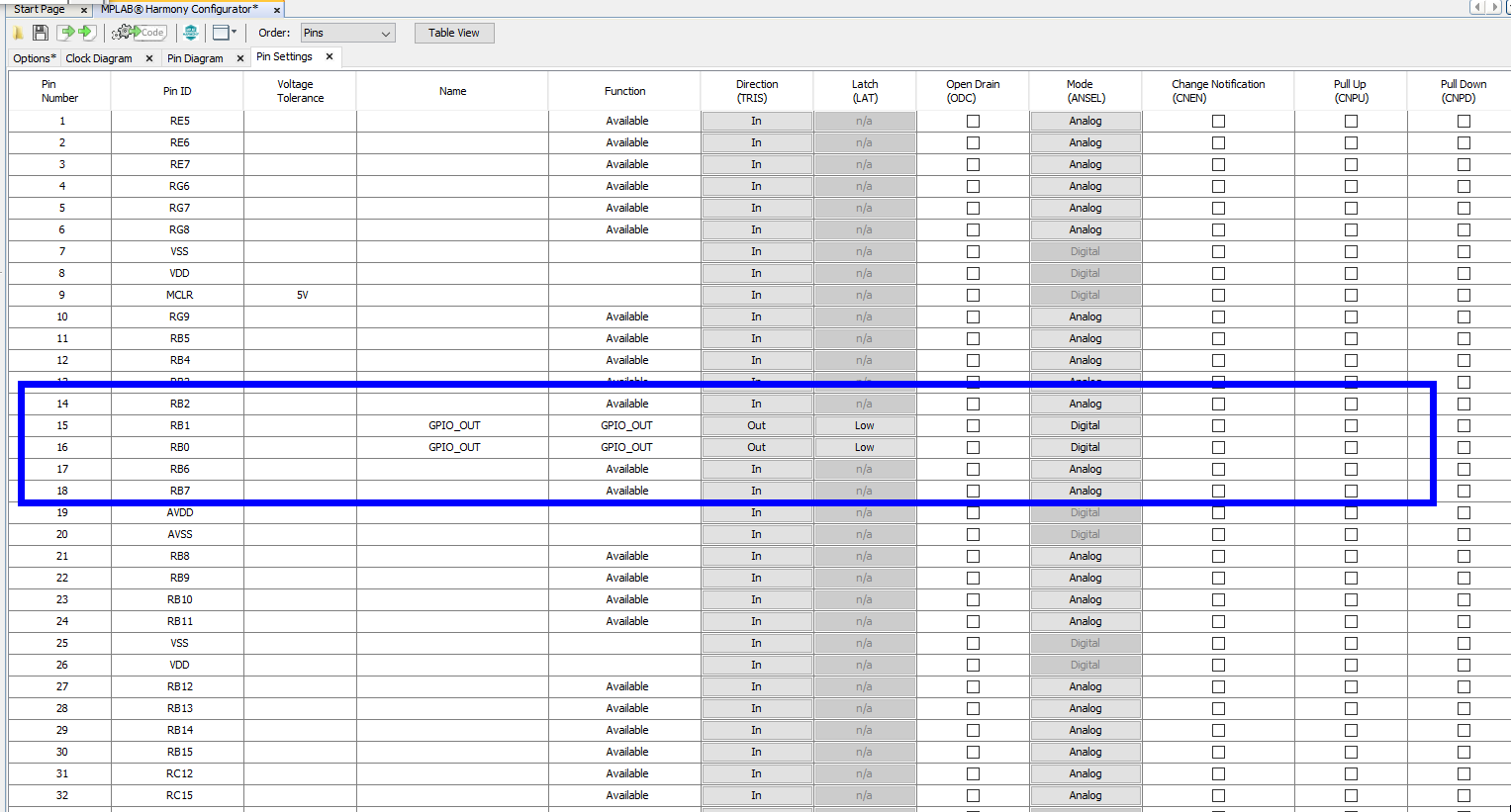
Обратим внимание на состояние LAT регистра уровень низкий.
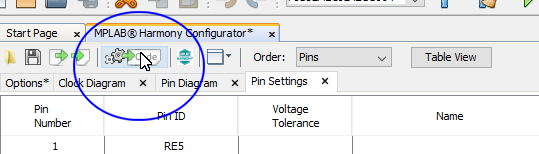
Выполним операцию создания кода проекта, нажмем на кнопку Code.
MHC предложит выбрать вариант сохранения конфигурации, сохраним.

Далее предложи вариант выбора стратегии для внесения изменений в наш проект, разберем это окно на “запчасти”.
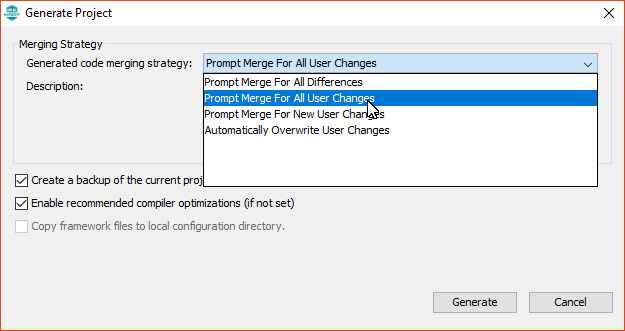
MHC предлагает 4 стратегии следующие стратегии, назовем так слияния кодов. Что под этим подразумевается, что у вас уже есть, что то (или пока еще ничего нет) на писаного и вам необходимо внести изменения в ваш проект.
• Prompt Merge for all Differences – Пользователю будут открываться “окна слияния” для всех создаваемых файлов и он должен принять решение вводить эти новые изменения или нет. Это будет включать в себя файлы, которые не имеют модификаций пользователя.
• Prompt Merge for All User Changes – Пользователю всегда будет предложено “окно слияния” для всех сгенерированных файлов, которые содержат изменения внесенные пользователем. Вы всегда должны выбирать эту стратегию слияния после изменения чего-либо на вкладке «Параметры», «Гармония MPLAB и Конфигурация приложения» (Options tab, MPLAB harmony & Application Configuration).
• Prompt Merge For New User Changes – Пользователю будет предложено “окно слияния” для всех сгенерированных файлов, которые содержат пользовательские изменения. Пользователю не будет предложено снова объединить изменения для данного файла, если пользователь не внесет дополнительные изменения в этот файл.
• Automatically Overwrite User Changes – Все сгенерированное содержимое файла будет заменено содержимым этой операции генерации. Любые изменения внесенные пользователем будут перезаписаны.
Дополнительные опции.
Create a backup of the current project state – Предоставляет возможность вернуть все сгенерированные файлы в их исходное состояние до генерации кода.
Enable recommended compiler optimizations (if not set) – Для проектов MPLAB Harmony настоятельно рекомендуется уровень оптимизации компилятора, по крайней мере, «O1». Эта опция установит уровень оптимизации компилятора на «O1», если в настоящее время уровень оптимизации не установлен.
Copy framework files to local configuration directory – Предоставляет возможность генерировать автономный проект. Все необходимые файлы будут добавлены в проект MPLAB X IDE, поэтому он может быть собран и запущен без платформы MPLAB Harmony.
Выберем параметр Prompt Merge for All User Changes и с генерируем проект. Загрузим в нашу демоплату, со светодиодами заметим ничего не произошло, как не горели так и не горят. Вернемся во вкладку Pin Settings и изменим состоянии порта RB0 с низкого на высокий.

Повторим операции по генерации, компиляции и загрузки проекта в демоплату. Какие изменения светодиод подключенный к порту RB0 светиться!!! Таким образом, мы при инициализации микроконтроллера можем в самом начале установить необходимые уровни на выводах портов.
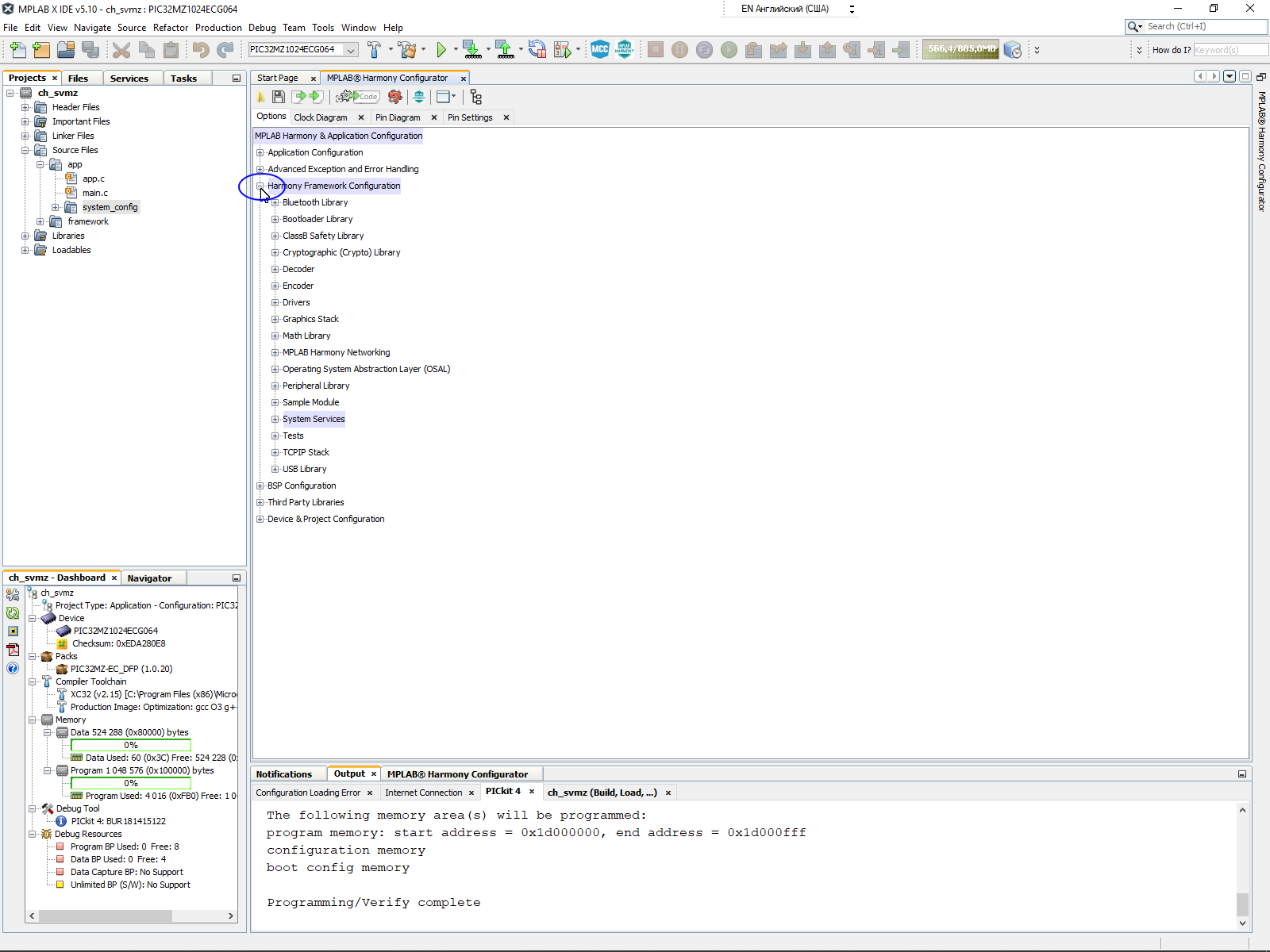
Идем далее нам необходимо “включит” таймер 1. Заходим в закладку Options – Параметры, развернем дерево Harmony Framework Configuration (конфигурация структуры).
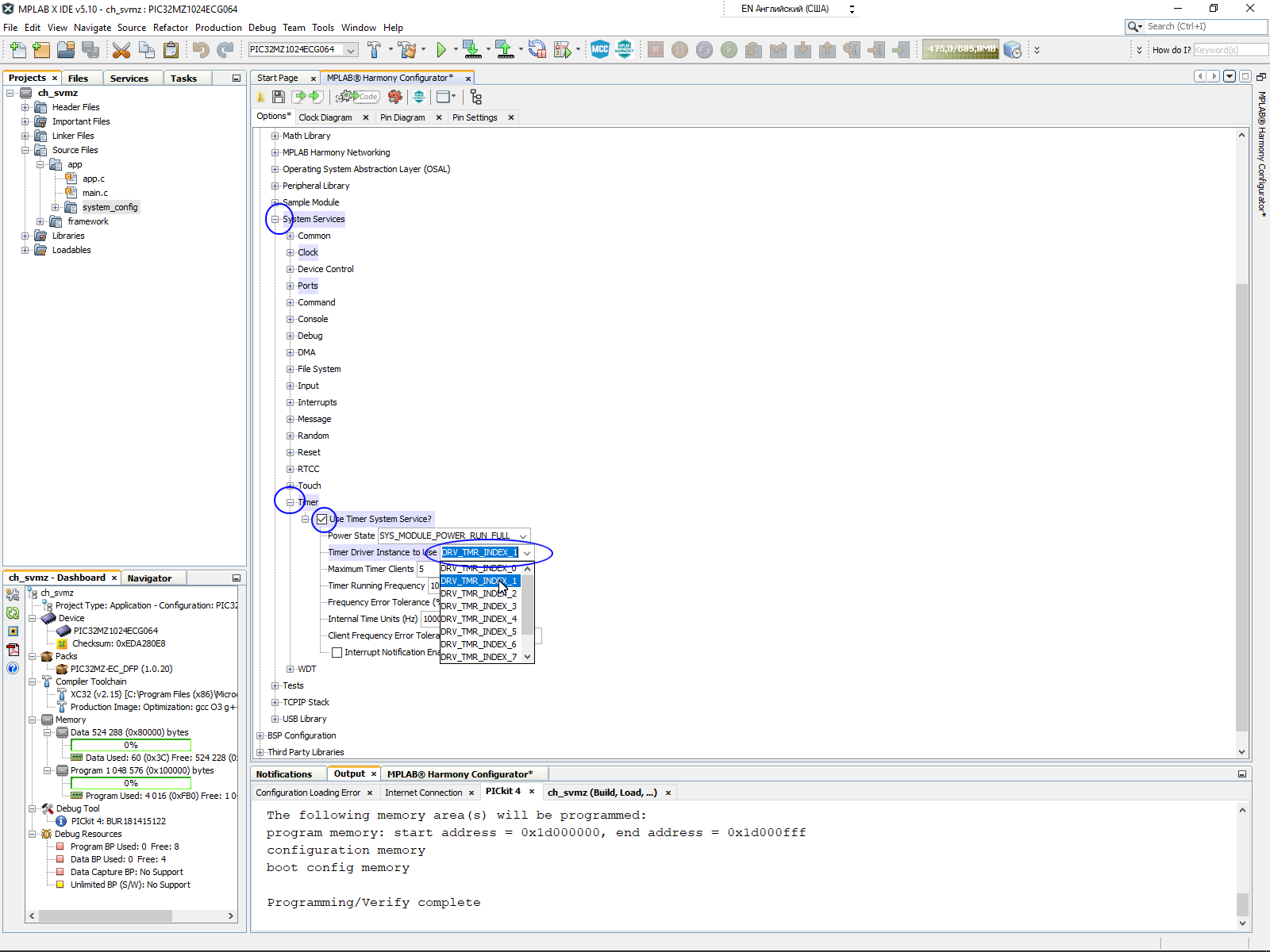
 Откроем Системные службы, выберем таймер, поставим птичку пользовательские настройки таймера, выберем, что мы будем настраивать таймер 1.
Откроем Системные службы, выберем таймер, поставим птичку пользовательские настройки таймера, выберем, что мы будем настраивать таймер 1.
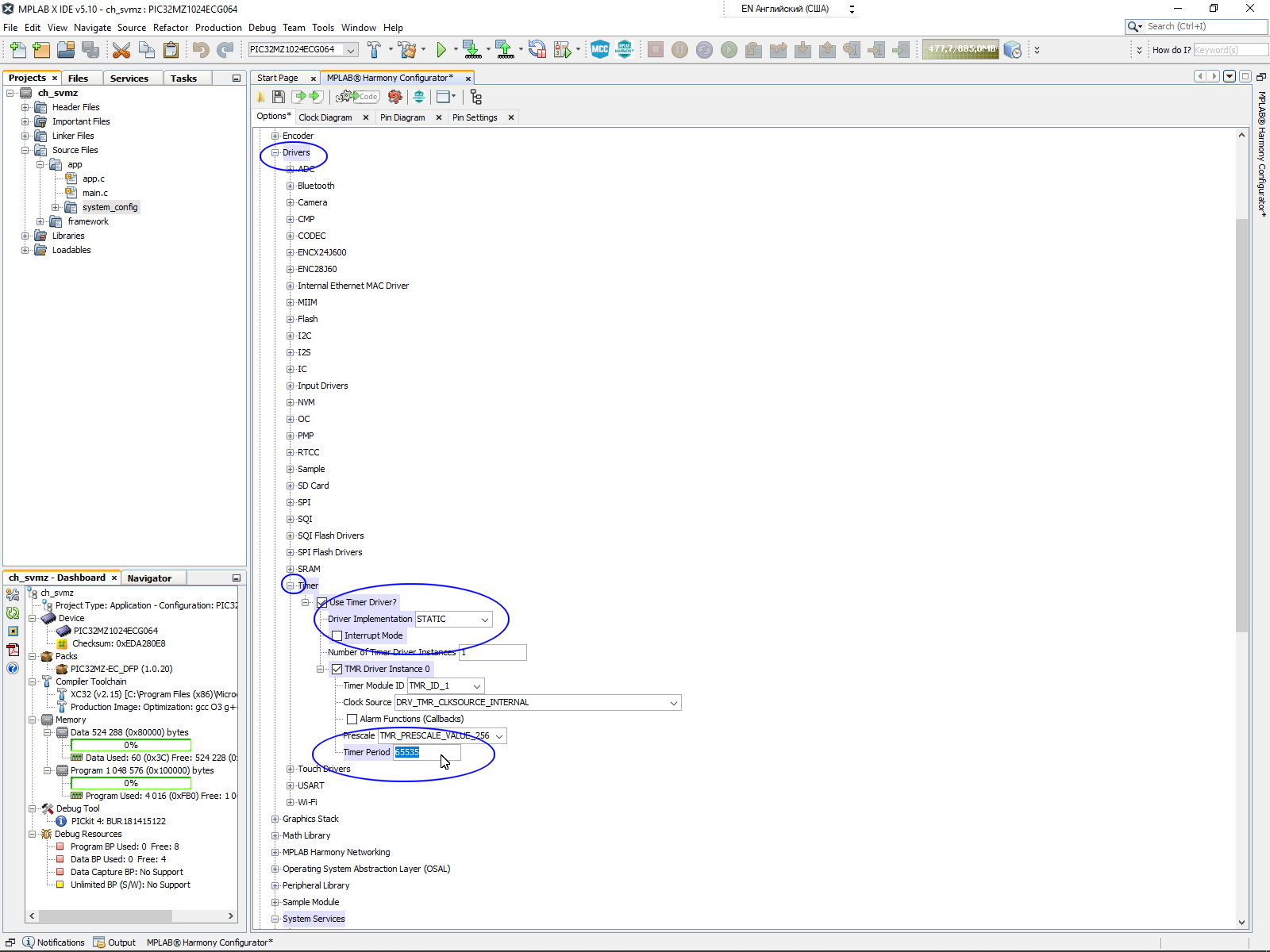
Больше мы никуда в этом месте “шкодливыми ручками” не лезем, потому, что нифига дальше не понимаем. После этого переместимся к дереву драйвера (Drivers), открываем таймер (птичка там уже стоит) выбираем реализацию драйвера как статическую (STATIC), отключаем прерывания, нам они (пока) не нужны, ставим птичку. выбираем модель драйвера TMR_ID_1 (она уже выбрана) и вводим параметр для предделителя 256 (если не выбрано другое) и задаем период максимальный 65535 (это максимально допустимое значение регистра периода таймера RP1). Т.е. настраиваем на работу таймера по всему ему возможному значению.
Запустим генерацию кода, сохраним конфигурацию, в предложенном окне, стратегию не меняем. Теперь добавим в “супер-цикл” вариант переключения светодиодов.
if(TMR1>50000)
{
TMR1=0;
LED1 = !LED1;
LED2 = !LED2;
}
Ну и конечно в начала описание для светиков.
#define LED1 LATBbits.LATB0 #define LED2 LATBbits.LATB1
Выполним компиляцию и прошьем демоплату, для этого нажмем 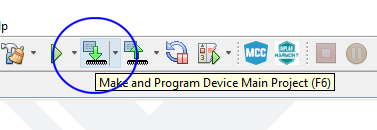
Результат, светики по переменно мигают. Что мы сделали мы при помощи MHC полностью настроили таймер и заставили работать проект мигания двух светиков, попеременно.
Сделаем еще одно изменение посмотрим как влияет изменение тактовой часто на входе таймера, и заодно разберемся как это делается в MHC. Помните где мы говорили, о PBCLK3? Вернемся в Clock Diagram. Изменим значение делителя в модуле с 2 на 25. Сформируем на входе таймера тактовую частоту 8МГц. Выполним всю последовательность для сборки, компиляции и тестирования проекта.
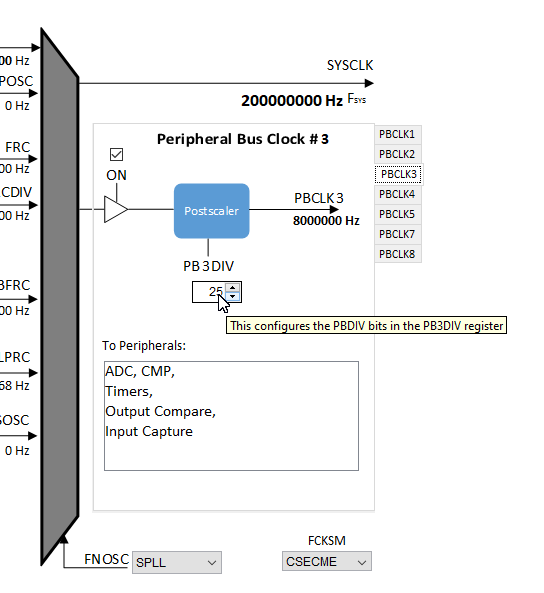
После запуска программы на демоплате, частота мигания значительно уменьшиться. В общем все классно и круто. Но все так, только чуточку не так. Для профессиональной работы в MCH необходимо пройти некоторый ликбез по понимаю, “где что, зачем и почём” ;). поэтому 4 часть посвятим теории MHC.
Проект к 3 части:
MPLAB® Harmony – или как это просто! Часть 3. Демопроект 281.11 KB 12 downloads
Демопроект к 3 части. ...Читайте в следующей части Project Structure – Структура проекта.
Это может быть интересно
 Customs codes for exportVisits: 89 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …
Customs codes for exportVisits: 89 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для … MAX7219/21 и 8х8 LED дисплеиVisits: 916 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно
MAX7219/21 и 8х8 LED дисплеиVisits: 916 MAX7219, MAX7221 предназначены для вывода информации на 8 разрядов семисегментного индикатора, но на нем легко организовать вывод на светодиодные индикаторы 8х8. продолжение следует…. Это может быть интересно Altium Designer – подготовка документации для производства и сборки печатных платVisits: 3621 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платVisits: 3621 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … Проблемы классической светомузыкиVisits: 2043 Светомузыка – что это такое? Определение: Светомузыка (жаргонное: цветомузыка) — вид искусства, основанный на способности человека ассоциировать звуковые ощущения со световыми восприятиями. Такое явление в неврологии получило название …
Проблемы классической светомузыкиVisits: 2043 Светомузыка – что это такое? Определение: Светомузыка (жаргонное: цветомузыка) — вид искусства, основанный на способности человека ассоциировать звуковые ощущения со световыми восприятиями. Такое явление в неврологии получило название …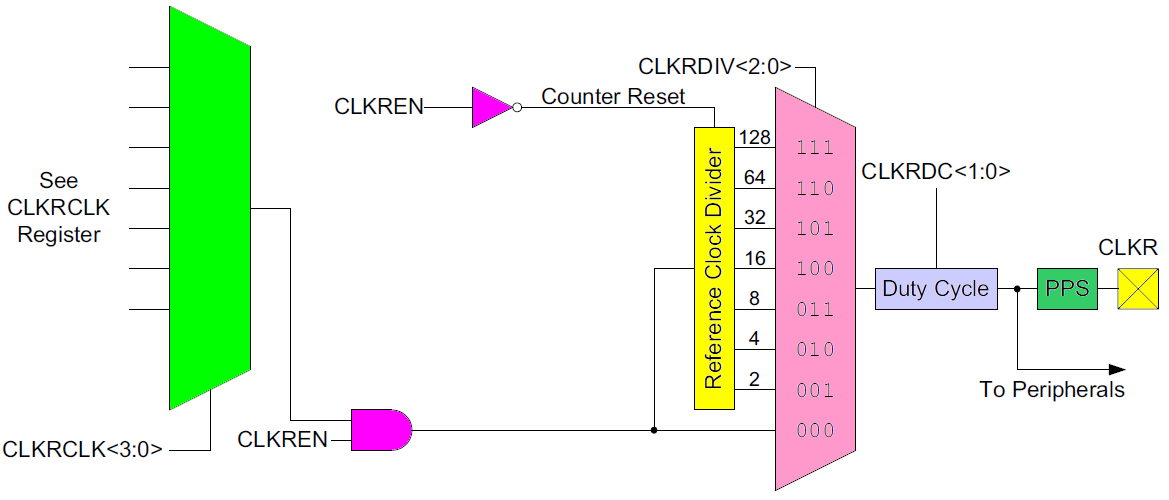 REFERENCE CLOCK OUTPUT MODULEVisits: 489 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от …
REFERENCE CLOCK OUTPUT MODULEVisits: 489 REFERENCE CLOCK OUTPUT MODULE Модуль формирования опорного тактового сигнала Модуль опорного тактового сигнала обеспечивает возможность посылать сигнал синхронизации на тактовый опорный выходной контакт или контакты (CLKR) в зависимости от … Дисплей KD035C-3A подключение и управлениеVisits: 689 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение …
Дисплей KD035C-3A подключение и управлениеVisits: 689 Дисплей KD035C-3A производиться компанией SHENZHEN STARTEK ELECTRONIC TECHNOLOGY CO.,LTD Характеристики Параметр Спецификация Единицы измерения Размер дисплея 70.08(H)*52.56(V) (3.5inch) mm Тип дисплея TFT active matrix Цветовая гамма 65K/262K colors Разрешение … Контроллер управления светодиодным освещением с дистанционным управлениемVisits: 1998 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще …
Контроллер управления светодиодным освещением с дистанционным управлениемVisits: 1998 Все активнее светодиоды входят в нашу жизнь. Всё эффективнее становится светодиодное освещение. Всё ниже опускаются цены. Всё больше появляется возможностей получения сочных цветов, простоты в управлении. Всё чаще … MPLAB® Harmony – или как это просто! Часть 1.Visits: 3552 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации …
MPLAB® Harmony – или как это просто! Часть 1.Visits: 3552 Часть первая – Установка Гармонии. Музыкальная тема к статье, слушаем: В начале запуска нового проекта и выбора микроконтроллера стоит задача правильно его сконфигурировать, прежде чем перейти к реализации … Проект с использованием MCC часть 02Visits: 2253 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем …
Проект с использованием MCC часть 02Visits: 2253 Когда мы запустили конфигуратор, самое главное понять, что с этим делать и как проверить, то что мы делаем работает или нет. Для начала настроим регистры конфигурации микроконтроллера и настроем … Проект с использованием MCC часть 07Visits: 947 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы …
Проект с использованием MCC часть 07Visits: 947 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы …
Комментарии