Views: 1120
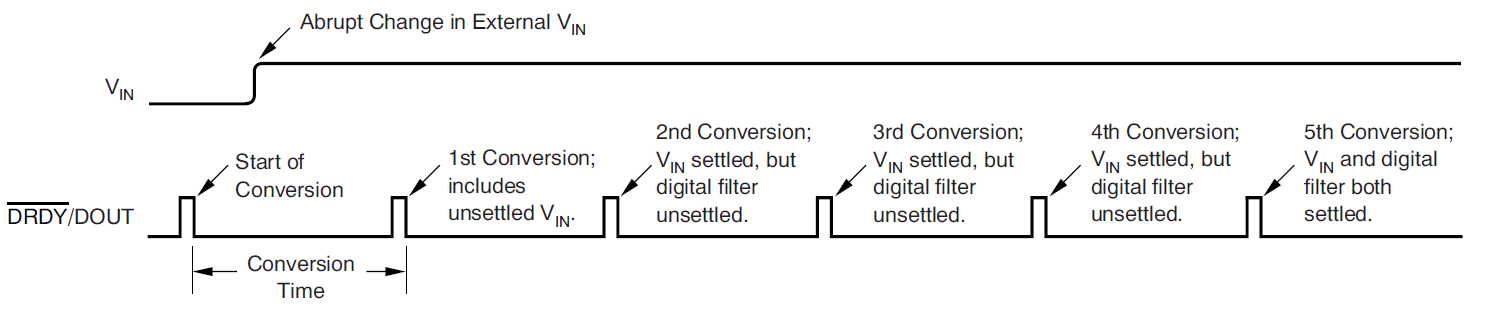
 АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
АЦП ADS1230 – это 20 битный АЦП со скоростью измерения 10 или 80 раз в секунду. При подаче питания АЦП постоянно выполняет измерения. Данные можно получить с него по SPI шине. Максимальная тактовая частота шины до 1 мГц. Каждое измерение выполненное АЦП инициализируется самим АЦП по шине данных положительным импульсом. Чтение микроконтроллер должен начинать по получению отрицательного фронта.
Данные передаются старшим битом в перед для чтения 20 бит необходимо 3 байта. Данные выровнены влево.
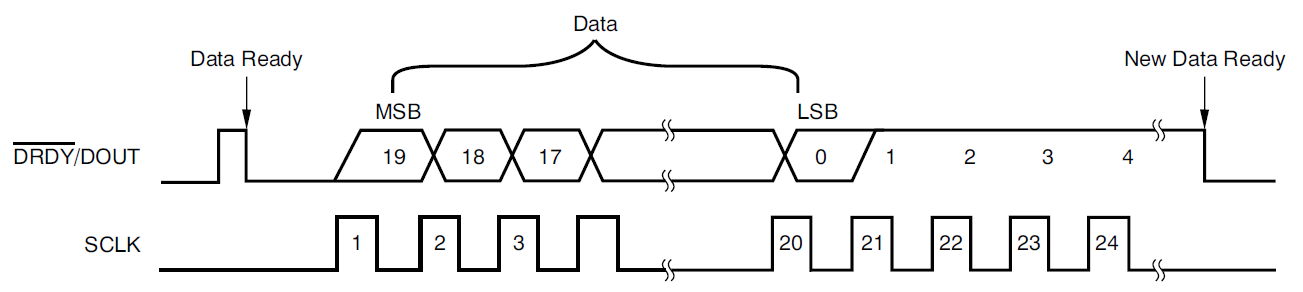
Для чтения данных необходимо настроить SPI по отрицательному фронту синхроимпульсов.
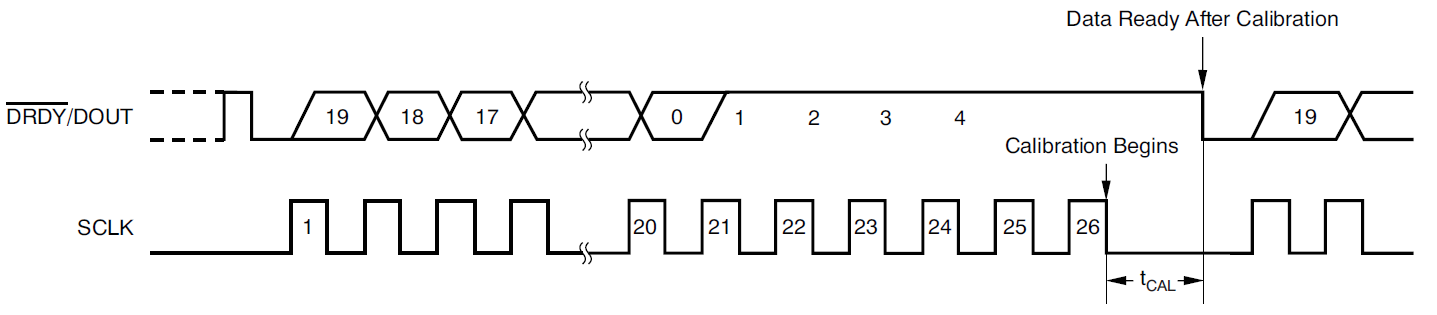
Управляя количеством синхроимпульсов можно управлять функциями АЦП, одна из них это калибровка АЦП.
Калибровки смещения
Калибровка смещения может быть начата в любое время для компенсации в ADS1230 погрешности смещения. Чтобы начать калибровку смещения, необходимо по крайней мере, два дополнительных SCLKs после получения 20 бит данных. Данные мы получаем чтением 24 бита. Если продолжить формирование SCLK, то задний фронт 26-го SCLK начинается цикл калибровки. Дополнительные импульсы SCLK могут быть отправлены после 26 SCLK, однако, активность на шине SCLK должны быть сведены к минимуму, во время калибровки смещения, для достижения наилучших результатов. В течение выполнения функции калибровки, аналоговые входные контакты отсоединены от входов АЦП и соответствующий сигнал подается внутри, чтобы выполнить калибровку. Когда калибровка завершена, DRDY/DOUT переходит в низкий уровень, что указывает, что новые данные готовы. Первое преобразование после калибровки содержит достоверные данные.
Стандартная схема подключения АЦП к мосту датчика для измерения веса.
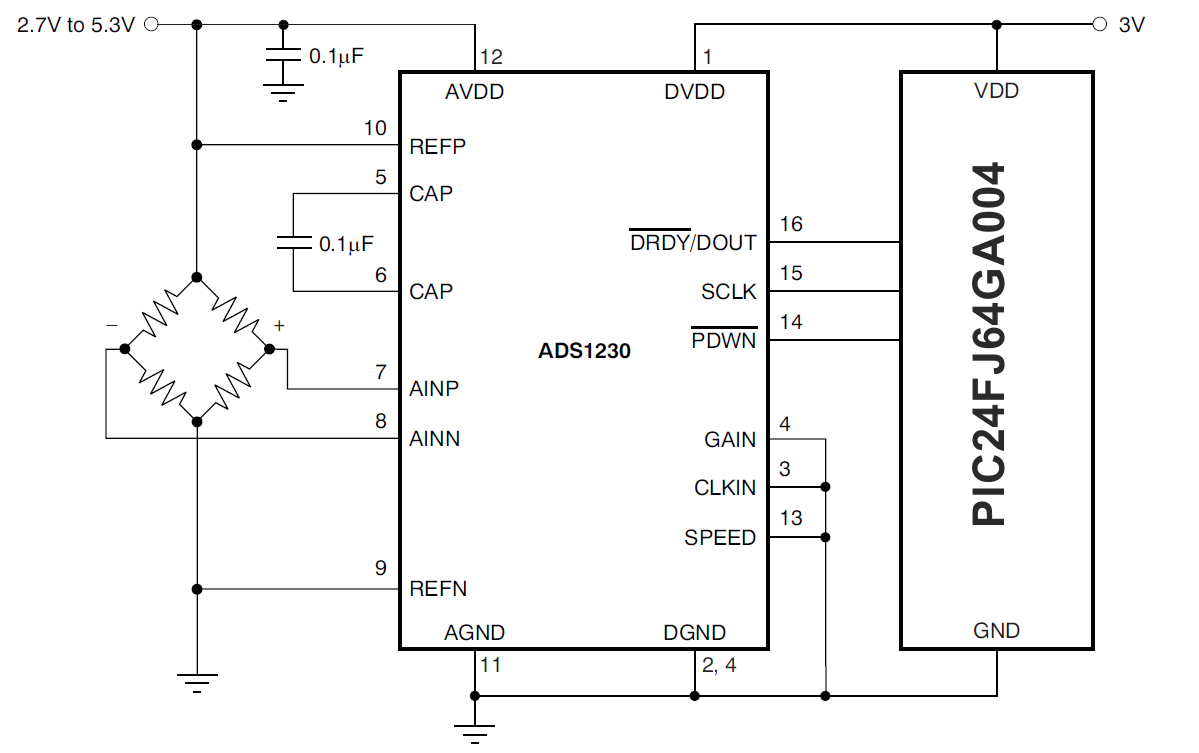
Вариант подключения АЦП к PIC24FJ64GA004.
Подключение будет выполнено к SPI2
void init_spi2 (void) // настройка SPI2
/* настраивается только на приём данных
* данные с АЦП
*/
{
/* SPI2 - настройка для работы с входным усилителем и индикатором
* PPRE
* 11 = Primary prescale 1:1
* 10 = Primary prescale 4:1
* 01 = Primary prescale 16:1
* 00 = Primary prescale 64:1
* SPRE
* 111 = Secondary prescale 1:1
* 110 = 2
* 101 = 3
* 100 = 4
* 011 = 5
* 010 = 6
* 001 = 7
* 000 = Secondary prescale 8:1*/
// RPOR4bits.RP9R=0b01001; // SPI2 Slave Select Output//CS
// RPOR6bits.RP12R=0b01010; // SPI2 Data Output
RPINR22bits.SDI2R = 20; // SPI2 Data Input - RP20/ нога 37
RPOR10bits.RP21R=11; // SPI2 Clock Output
SPI2STATbits.SPIEN = 0; // выключить
SPI2CON1 = 0b0000000000111001; //FCY/1/6=50/6=8,3
/* ||||||||||||||++--- PPRE<1:0>: настройка предделителя 1 11 = Primary prescale 4:1
* |||||||||||+++----- SPRE<2:0>: настройка предделителя 2 111 = Primary prescale 8:1
* ||||||||||+-------- MSTEN: 1 = Режим ведущего, 0 = режим ведомого
* |||||||||+--------- CKP:0 = пассивный уровень шины SCL 1- высокий, 0-низкий
* ||||||||+---------- SSEN:Slave Select Enable bit (Slave mode)
* |||||||+----------- CKE: смена бита данных происходит: 1-от активного в пассивное(синх-0/1)/0-пассивного в активное (синх-1/0)
* ||||||+------------ SMP:0 = Input data sampled at middle of data output time
* |||||+------------- MODE16: Communication is word-wide (8 bits)
* ||||+-------------- DISSDO: 0-в работе
* |||+--------------- DISSCK: 0-в работе
* +++---------------- не используются
*/
SPI2CON2 = 0b0000000000000000;
/* |||||||||||||||+--- не используется
* ||||||||||||||+---- FRMDLY:
* |||+++++++++++----- не используются
* ||+---------------- FRMPOL:
* |+----------------- SPIFSD:
* +------------------ FRMEN:
*/
SPI2STAT = 0b1000000000000000;
/* |||||||||||||||+--- SPIRBF: Флаг приемного буфера 1 - данные приняты 0- прием выполняется SPI2RXB пуст
* ||||||||||||||+---- SPITBF: Флаг передатчика 1 - передача не началась (буфер полон), 0 - передача началась буфер пуст (устанавливается сбрасывается аппаратно)
* ||||||||||++++----- не используются
* |||||||||+--------- SPIROV: 1 - произошло переполнение 0 - нет переполнения премного буфера.
* |||++++++---------- не используются
* ||+---------------- SPISIDL: режим работы в состоянии ожидания 0 - работает 1 - отключен модуль
* |+----------------- не используется
* +------------------ SPIEN: 1 - модуль включен 0 - выключен.
*/
SPI2STATbits.SPIEN = 1; // БИТ Включить - должен быть активирован последним, чтобы вступили в действии все изменения.
}
Сама обработка данных и синхронизация выполняется через прерывания по входу через которые на SPI2 поступают данные. Настройка прерывание:
void ADCIZ (void)// включить измерение
{
ADCVMOSST=1; // подать питание на датчик
ADCPDWN=1; // включить ADC
CNEN2bits.CN25IE=1; // разрешить прерывание по входу
_CNIF = 0; // сбросить прерывание
_CNIE = 1; // включить прерывание
}
Первые две строчки это если есть необходимость в управлении подачей питания на измерительный мост и управления режимом “слип” АЦП. Следующие три строки это настройка режима прерывания по входу через который АЦП получает данные.
Получение данных происходит через функцию прерывания:
void __attribute__((interrupt, auto_psv)) _CNInterrupt (void)
{
unsigned long datain;
_LATB2=!_LATB2; // индикация работы АЦП
while(PORTCbits.RC4); // ожидать низкого уровня на входе
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]=datain<<16; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad]+=datain<<8; // загрузка данных в буфер, сброс бита SPIRBF
SPI2BUF=0; // запуск чтения
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF;
ADCbufer[ucazad++]+=datain; // загрузка данных в буфер, сброс бита SPIRBF
if(ucazad==filtrADC)ucazad=0; // инициализация указателя.
//калибровка
if(Bit.calADC) // если установлен выполнить калибровку
{
Bit.calADC=0; // сбросить флаг калибровки
SPI2BUF=0; //
while(!SPI2STATbits.SPIRBF); // ожидать загрузки буфера
datain=SPI2BUF; // сброс бита SPIRBF
}
_CNIF = 0; // сброс прерывания
}
Флаг Bit.calADC – предназначен для активирования режима калибровки. Данные загружаются в буфер ADCbufer[] размер которого может быть ограничен переменной filtrADC.
Это может быть интересно
 MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1161 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера.
MTouch® Модуль Емкостной Библиотеки для MPLAB®X Code Configurator (MCC)Views: 1161 Введение MTouch ® Модуль Емкостной Библиотеки для MPLAB ® X Code Configurator (MCC) позволяет быстро и легко генерировать решение кода на Cи для емкостной сенсорной кнопки, датчика приближения и слайдера. PIC18F25K42 – v. A001 – выявленные баги.Views: 592 Модуль I2C Не работает при использовании в стандартной конфигурации MCC. Требует особой нестандартной конфигурации и управления для нормальной работы. Обойти Обход проблемы возможен библиотека см статью. Модуль ADC2 На …
PIC18F25K42 – v. A001 – выявленные баги.Views: 592 Модуль I2C Не работает при использовании в стандартной конфигурации MCC. Требует особой нестандартной конфигурации и управления для нормальной работы. Обойти Обход проблемы возможен библиотека см статью. Модуль ADC2 На … Бегущие огни (ch-bo-36)Views: 2417 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется …
Бегущие огни (ch-bo-36)Views: 2417 Проект на PIC-микроконтроллере PIC16F648A. Количество каналов 36. Для индикации используется подключение по матрице 6х6. Расположение светодиодов в одну линию. Все эффекты написаны для возможности увеличения количества светодиодов. Рекомендуется … Интерактивные LedViews: 453 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedViews: 453 Тема проекта продолжение следует…. Это может быть интересно Проект с использованием MCC часть 04Views: 1110 Теперь простого горения светиков нам не достаточно, заставим их мигать. Для начала используем первобытно простой способ, но достаточно простой. Используем функции delay, напрягаться откуда они берутся не будем, самое …
Проект с использованием MCC часть 04Views: 1110 Теперь простого горения светиков нам не достаточно, заставим их мигать. Для начала используем первобытно простой способ, но достаточно простой. Используем функции delay, напрягаться откуда они берутся не будем, самое … BMP280 – температура и атмосферное давление – учебный проектViews: 2037 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо …
BMP280 – температура и атмосферное давление – учебный проектViews: 2037 Учебный проект на PIC32 и светодиодной панели P5 (2121)-168-6432-80 (32*64). Проект позволяет ознакомиться с простой графикой и с чтением давления и температуры с датчика BMP280. Для тестирования необходимо … ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 5798 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. …
ESP8266 процедура получение данных даты и времени от серверов точного времени.Views: 5798 Эта функция доступна уже в версии 1.6.1. Для многих приложений, необходимо часы реального времени, если в вашем проекте есть модуль WiFI ESP8266, то легко можно сделать следующим образом. … Сенсорный выключатель светаViews: 10665 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида …
Сенсорный выключатель светаViews: 10665 Хотя в настоящий момент актуальны системы управления освещением с передачей данных по электросети, но я думаю, что проекты такого рода тоже имеют право на жизнь. Анонс Три вида … Development of temperature control and management systemsViews: 60 Catcatcat Electronics Пошта для контакту e-mail: catcatcat.electronics@gmail.com
Development of temperature control and management systemsViews: 60 Catcatcat Electronics Пошта для контакту e-mail: catcatcat.electronics@gmail.com Самый простой диммер для светодиодного освещенияViews: 2976 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …
Самый простой диммер для светодиодного освещенияViews: 2976 Светодиоды все больше входят в нашу жизнь как источники освещения и как само собой разумеющееся, это вопрос регулировки яркости. Существует множество схемных решений, но в нашем варианте мы …