
Views: 3625
 APA102
APA102

В 2014 году фирма Shenzhen Led Color Optoelectronic Co., Ltd http://www.szledcolor.com/ начала производство светодиодов на драйвере APA102. Это серия так называемых светодиодов со встроенным драйвером. Основной особенностью этих светодиодов, что в них применен упрощенный вид SPI интерфейса, шина данных и тактовая шина. Особенностью драйвера, это встроенный в данный драйвер, это 5 битовый регистр общей яркости, т.е. эти светодиоды уже наиболее близко подошли к настоящим драйверам светодиодных экранов. Максимальная тактовая частота заявленная производителем 1,2 МГц, первые испытания на ленточки длиной из 30 светодиодов, подаренных мне производителем, показали довольно внушительные результаты, на тестовом столе они нормально работают на тактовой в 2,5 МГц. Если их сравнивать с такими светодиодами как WS2812B , то по скорости выигрыш более чем в 5 раз (на 2,5 МГц)!!!
У WS2812B проблема в том, что чем больше длин цепочки, тем уменьшается скорость передачи, это связано с тем, что необходимо формировать импульс сброса такой длины, чтобы его времени хватило на распространения через всю группу светодиодов.
По мере дальнейшей разработки конструкций, протестирую максимальную тактовую на большем количестве светодиодов, чтобы определить реальные характеристики.
ФИЗИЧЕСКИЕ РАЗМЕРЫ
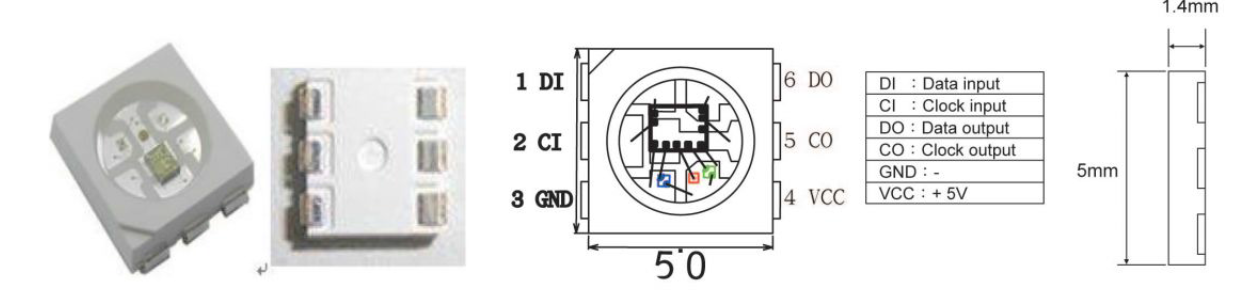
Светодиоды упаковываются в стандартный SMD 5050. Расположение выводов сделано грамотно, для подвода питания и прокладки шины данных и синхронизации.
Какая больше всего особенность меня поразила, что на ленточках нет не единого блокирующего конденсатора по питанию, и все работает. Тут только можно сказать Браво разработчикам чипов. И что самое главное (на что страдают WS2812B) входные сигналы – ТТЛ логики, т.е я подключил к контроллеру, с 3,3 вольтовым питанием, ленточку, работает идеально (лента питается от 5 вольт).
Управление Светодиодом “по двум проводам”
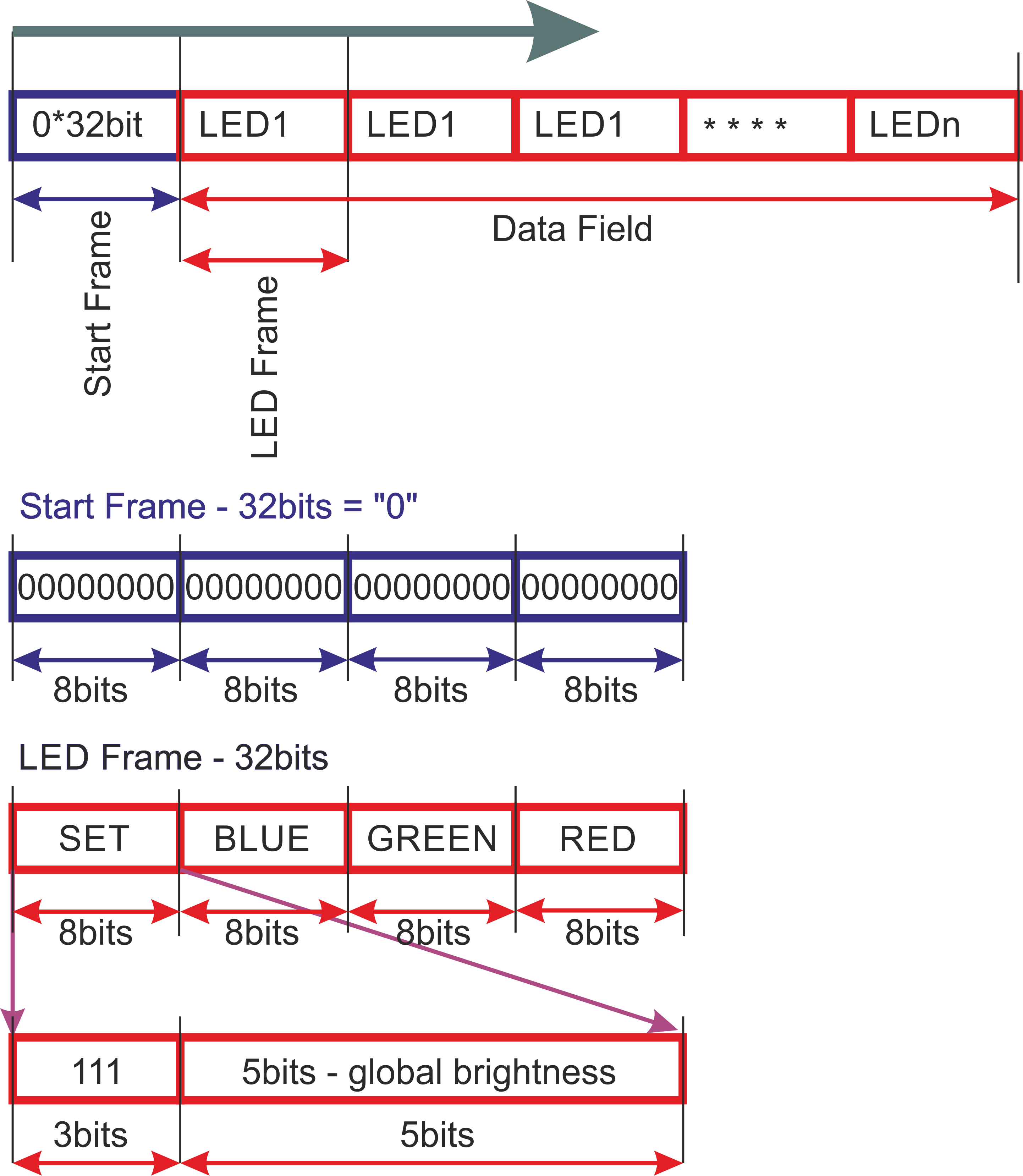
Принцип управления прост, тактовая шина Clock проходит напрямую через драйвер светодиода (внутри используется повторитель), задержка на передачу тактовой, скажем так минимальная. По шине DATA принцип работы следующий, если на вход поступило от 4 последовательных байт (32 бита) с нулями, то драйвер переключается в режим приема. Если в режиме приема первый байт “0” то он работает как ретранслятор передает нулевые байты на выход, тем самым инициализируя следующие драйверы светодиодов.
Если следующий байт не нулевой и самое главное в нем должны быть 7, 6, 5 бит = “1”, это значит, что эти следующие 4 байта данных будут “поглощены” этим драйверов, при этом в этот момент на выходе он также формирует нулевые байты. Если следующие 4 байта тоже несут информацию (первый байт не равен нулю и имеет три единицы в старших битах), то они теперь будут на прямую транслироваться на выход.
Итог. Для управления светодиодами в цепочке, необходимо:
- передать в начале 4 байта синхронизации.
- передавать данные по 4 байта на каждый светодиод который есть в цепочке.
Графически это можно представить так:
Программирование
В этом разделе я опишу вариант на котором я остановился, для управления этими светодиодами. Скорость на которую рассчитаны APA102 позволяют на них строить небольшие видеоэкраны. Предлагаемый вариант для такого видео экрана. Массив для передачи удобно формировать так:
#define height 1 // высота дисплея, в настоящем примере просто полоска #define width 31 // длина дисплея, 30 светодиодов + 1 "синхро байт" (первые 4 байта всегда нули, это Start Frame) #define SRGB 4 // глубина дисплея яркость, синий, зеленый, красный // для удобства описания выбранного цвета #define BRI 0 // задание яркости 0b111xxxxx где х - яркость #define CBL 1 // адрес для синего цвета #define CGR 2 // адрес для зеленого #define CRE 3 // адрес для красного volatile unsigned char APADISP[height][width][SRGB]; // массив яркостных режимов
Для инициализации массива удобно применить цикл:
// инициализация массивов
brightness=brightness|0b11100000; // настройка регистра яркости
// загрузка буфера для тест
for (cyhei=0;cyhei<height;cyhei++) // высота
{
for (cywid=0;cywid<width;cywid++) // количество светодиодов в строке
{
for (cyrgb=0;cyrgb<SRGB;cyrgb++)
{
if(!cyhei && !cywid)APADISP[cyhei][cywid][cyrgb]=0; // первые 4 байта инициализация всегда нулями.
else
if (!cyrgb)APADISP[cyhei][cywid][cyrgb] = brightness; // каждый 0 байт загрузка параметра яркость
else APADISP[cyhei][cywid][cyrgb] = 0; // установка яркости в 0
}
}
}
Один из вариантов загрузки массива в SPI2 модуль, для PIC32:
while(SPI2STATbits.SPITBF);
SPI2BUF=0x0; // start frame
while(SPI2STATbits.SPITBF);
SPI2BUF=0x0; //
while(SPI2STATbits.SPITBF);
SPI2BUF=0x0; //
while(SPI2STATbits.SPITBF);
SPI2BUF=0x0; //
for (scikl=0;scikl<LENDIS;scikl++)
{
while(SPI2STATbits.SPITBF);
SPI2BUF=brightness; // Global
while(SPI2STATbits.SPITBF);
SPI2BUF=BLUELED[scikl]; // transmit BLUE
while(SPI2STATbits.SPITBF);
SPI2BUF=GREENLED[scikl]; // transmit GREEN
while(SPI2STATbits.SPITBF);
SPI2BUF=REDLED[scikl]; // transmit RED
}
Светодиоды в упаковке, черная ленточка для светомузыкальных устройств более подходит, чем белого света.
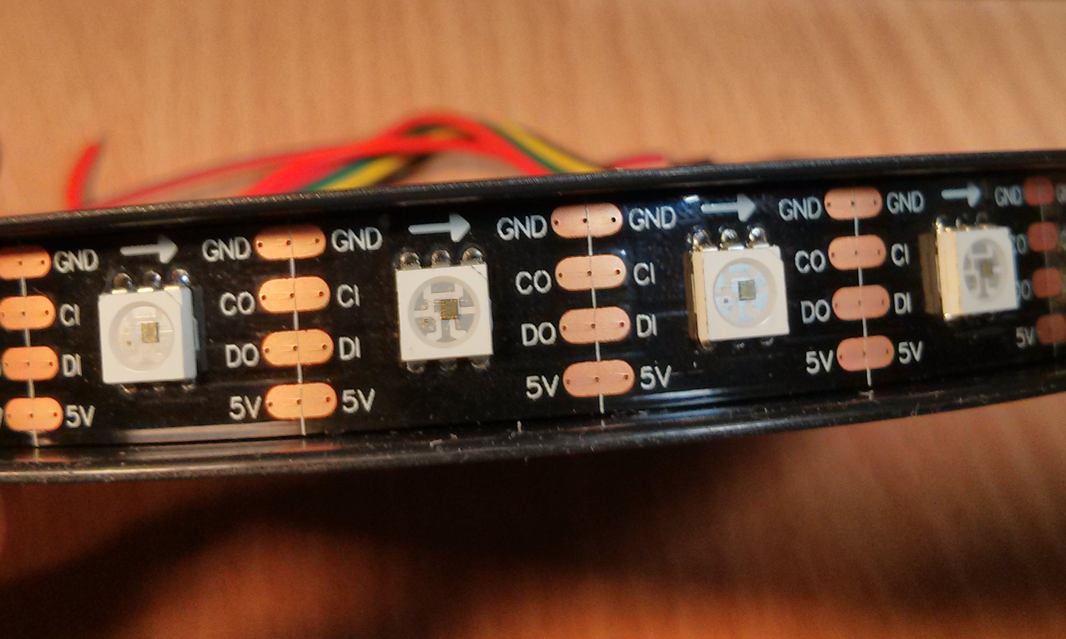
Схема соединения светодиодов

Диаграмма прохождения данных, через три драйвера, видно, что драйвер после прихода на его вход последовательно 4 нулевых байт переключается в режим инициализации, при этом пока он не примет, первые данные, его выход находиться в низком состоянии, тем самым синхронизируя, драйвер следующего светодиода.
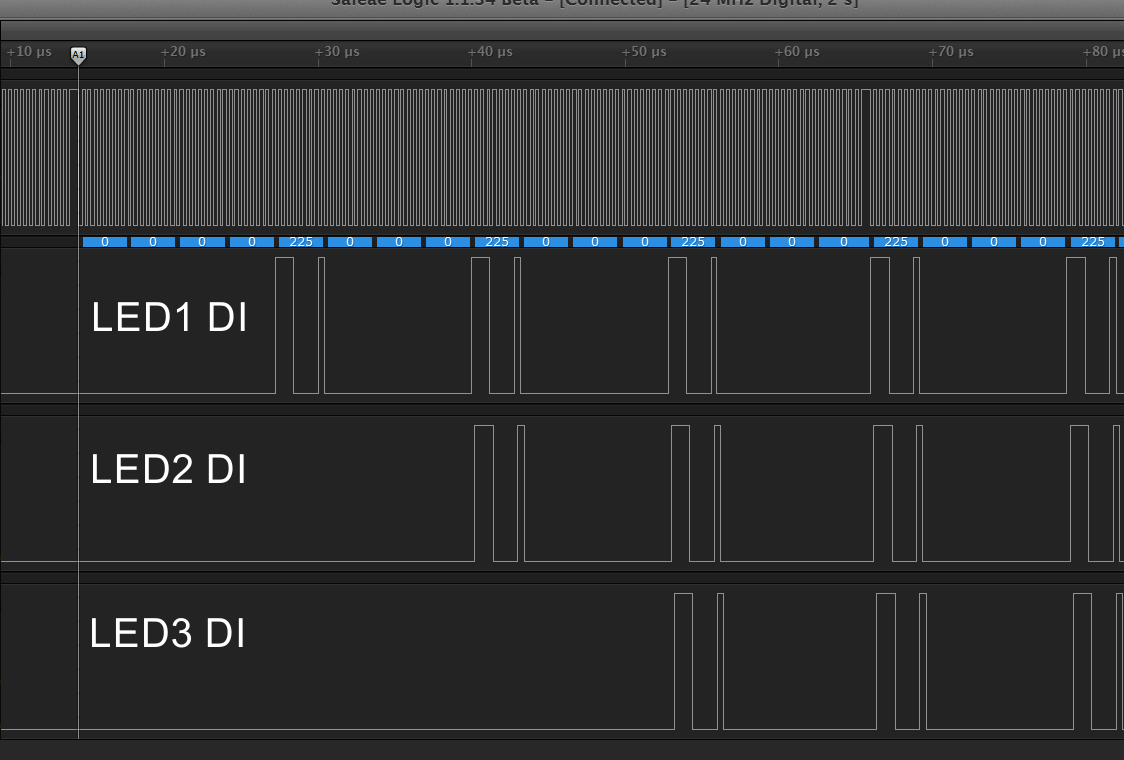
Кадр синхронизации отличается от кадра данных, тем, что первый байт равен “0”.
Видео тестирования ленточки из 30 светодиодов, тактовая 2,5 МГц
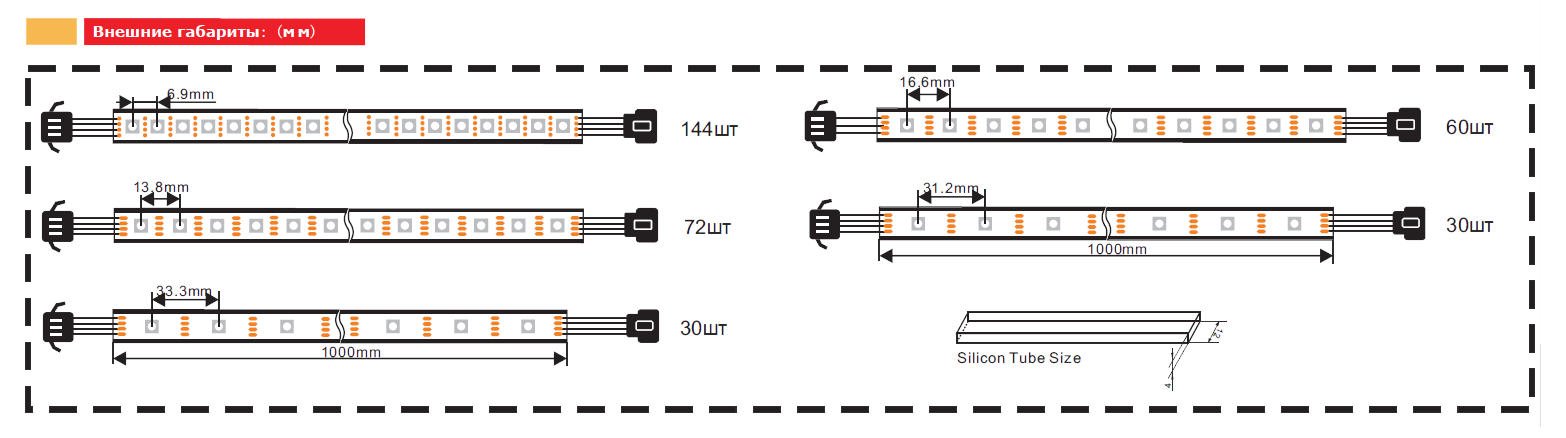
Габаритные размеры светодиодных лент
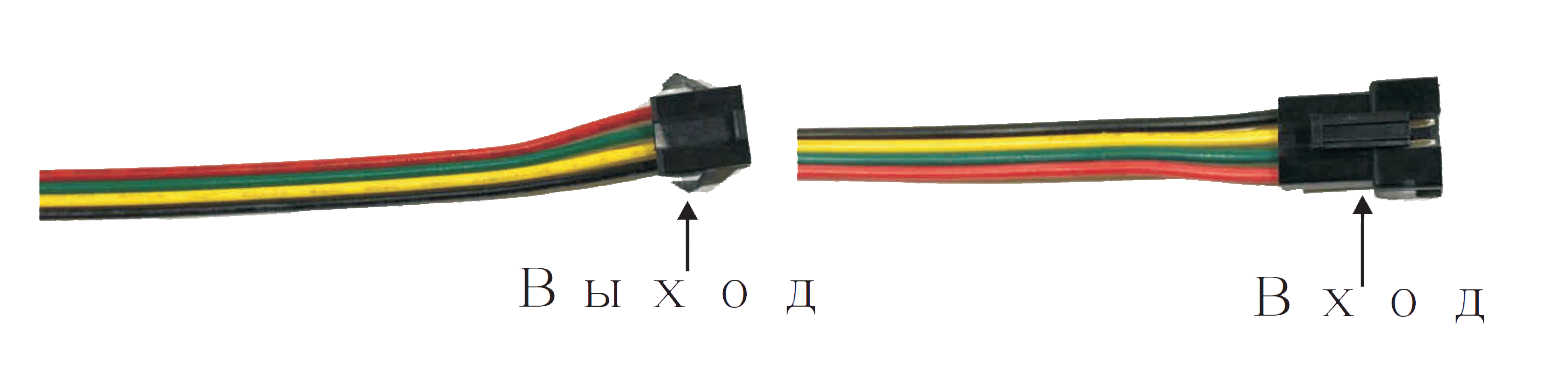
Внешний вид соединителей идущих в комплекте с лентами
Описание на ленту:
APA102 - светодиоды со встроенным драйвером и SPI интерфейсом 1,015.55 KB 498 downloads
APA102 - светодиоды со встроенным драйвером и SPI...пример использования светодиодов на драйвере APA102
Это может быть интересно
 LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG.
LCD драйвер – UC1601sViews: 1839 http://svetomuzyka.narod.ru/project/UC1601s.html Читайте обновление на http://catcatcat.d-lan.dp.ua/?page_id=178 В данный момент можно приобрести в ООО “Гамма” несколько типов индикаторов на драйвере UC1601s. RDX0048-GC, RDX0077-GS, RDX0154-GC и RDX0120-GC выполнены по технологии COG. Гаджеты для домашней автоматики – Датчик движенияViews: 1510 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет …
Гаджеты для домашней автоматики – Датчик движенияViews: 1510 Управление светодиодным освещением – Датчик движения. Данный гаджет предназначен для управления освещением рабочих столов (кухонных столов), освещение прихожих, освещение зеркал в прихожих, автоматическое включение света в коридорах. Датчик позволяет … Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13868 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 …
Система AT команд версии V2.0 для ESP8266 и ESP32Views: 13868 Появление нового модуля на базе ESP32 заставило систематизировать систему AT команд, а так же систему обновления и для модулей на базе ESP8266. Начиная с версии v2.0 в ESP8266 … Trimax – кодирование и декодирование ИК-командViews: 2538 Первое, что надо понять назначение кнопок клавиш пульта, а также, что за кодирование реализовано в ИК- пульте. Для назначения клавиш обратимся к описанию, а для взлома кодирования воспользуемся …
Trimax – кодирование и декодирование ИК-командViews: 2538 Первое, что надо понять назначение кнопок клавиш пульта, а также, что за кодирование реализовано в ИК- пульте. Для назначения клавиш обратимся к описанию, а для взлома кодирования воспользуемся …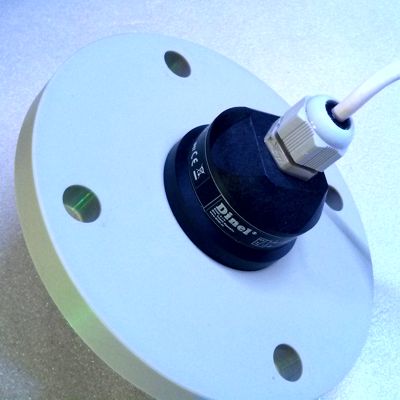 Ultrasonic Level Meters – ULM –53LViews: 806 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики …
Ultrasonic Level Meters – ULM –53LViews: 806 Измерение расстояния при помощи ультра звукового датчика ULM–53L–10. Диапазон измерения от 0,5 м до 10 м, полностью пластмассовый излучатель PVDF, механическое соединение фланцем из полиэтилена HDPE (исполнение “N”) Характеристики … AD9833 – Programmable Waveform GeneratorViews: 3090 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить …
AD9833 – Programmable Waveform GeneratorViews: 3090 Простой генератор звуковых частот на AD9833. Для тестирования БПФ в светомузыке мне нужен был генератор звуковых частот. Я использовал советский Г3-112, но он себя давно изжил. Все думал купить … Проект с использованием MCC часть 10Views: 1138 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – …
Проект с использованием MCC часть 10Views: 1138 Алгоритм управления освещением от нажатия кнопки. Обработка удержания кнопки: Мы должны проверить кнопка в настоящий момент нажата и флаг удержания установлен, если да Проверить таймер удержания “отработал” – … Универсальный терморегулятор ch-c3000Views: 3237 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в …
Универсальный терморегулятор ch-c3000Views: 3237 Терморегулятор ch-c3000 предназначен для управления системами регулирования температуры в пределах от – (минус) 55 до + 125 С. Регулятор может использоваться как в системах отопления, так и в … Development Boards PIC18F47Q84Views: 8491 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 …
Development Boards PIC18F47Q84Views: 8491 Microchip тішить новими мікроконтролерами. Особливістю цього MCU – це багата інтелектуальна периферія, що дозволяє вирішувати такі завдання на 8 бітних MCU, які неможливо реалізувати на деяких навіть 32 … MPLAB® Code ConfiguratorViews: 1825 MPLAB ® Code конфигуратор (MCC) является свободно распространяемым плагином, это графическая среда программирования, которая генерирует бесшовный, легкий для понимания кода на Cи, чтобы вставить его в свой проект.
MPLAB® Code ConfiguratorViews: 1825 MPLAB ® Code конфигуратор (MCC) является свободно распространяемым плагином, это графическая среда программирования, которая генерирует бесшовный, легкий для понимания кода на Cи, чтобы вставить его в свой проект.