Оптический сенсор, назначение оптический концевик, для автоматики, бесконтактный выключатель с функцией автоматического отключения…
Метка:Первая программа
Цифровой ввод данных
Visits: 4176
Цифровой ввод данных – Чтение состояния кнопок.
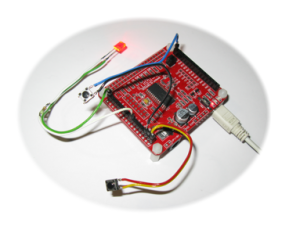
Для реализации этого проекта нам потребуется две тактовые кнопки. Надо будет к их выводам припаять проводки с контактами.
Порты контроллера (в последних моделях) Представляют собой комбинацию из четырех основных регистров. Это регистры управления направлением передачи цифровых (данных с логическими уровнями) данных TRIS. Регистры ввода цифровых данных PORT. Регистры вывода цифровых данных LAT. И регистры отвечающие за тип данных, т.е.аналоговые или цифровые ANSEL.
Для нашего примера мы будем использовать порт B. Для контроля мы применим светодиод подключенный к выводу RB1. Для ввода информации мы будем использовать выводы порта RB7 и RB6. К этим портам мы подключим тактовые кнопки.
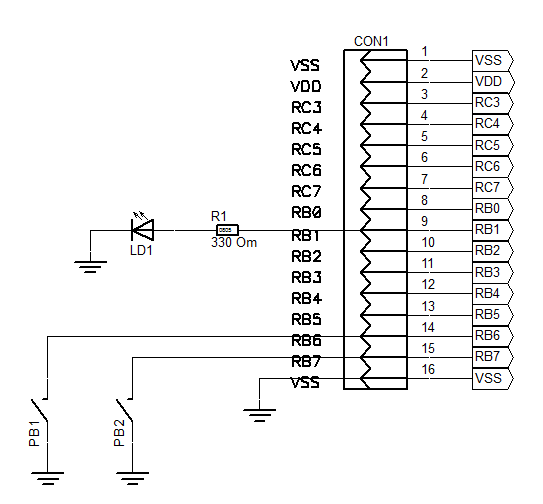 Схема приведена применительно к плате ILLISSI-4B-primum. Теперь когда мы собрали схему начинается самое интересное.
Схема приведена применительно к плате ILLISSI-4B-primum. Теперь когда мы собрали схему начинается самое интересное.
Первое это надо правильно сконфигурировать порты контроллера. В нашего контроллера PIC16F1936 три порта A, B, C. Первые два могут работать и аналоговыми сигналами. Третий только цифровой.
Возможный вариант настройки портов и тактового генератора:
// настройка внутренего генератора 8*4=32мГц
OSCCON=0b11110000;
// ||||||||
// ||||| ++-- SCS<1:0> основной гене-р (раб. через PLL)
// |++++----- IRCF<3:0> частота 8 мГц
// +--------- SPLLEN умножитель 1-включен
// конфигурирование портов микроконтроллера
TRISA = 0; // настроить на вывод данных
PORTA = 0; // установит низний уровень
ANSELA = 0; // настроить как цифровой
TRISB = 0b11000000; //два на ввод данных, остальные на вывод
// || +--- порт на вывод данных - RB1 инд. - светодиод
// |+ --------- порт на ввод данных - RB6
// +---------- порт на ввод данных - RB7
PORTB = 0; // установит низний уровень
ANSELB = 0; // настроить как цифровой
PORTC = 0; // настроить на вывод данных
TRISC = 0; // установит низкий уровень
nWPUEN = 0; // включить резисторы
WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
Теперь необходимо к портам на которых установлены тактовые кнопки создать высокий проверь. Для этого мы будем использовать подтягивающие резисторы WEAK PULL-UPS которые встроены в порт B. Для этого необходимо выполнить следующее:
nWPUEN = 0; // включить резисторы WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
На этом настройки контроллера окончены, теперь приступаем к самой программе.
Кода мы активировали подтягивающие резисторы на выводах Порта B устанавливается высокий логический уровень. При нажатии на тактовую кнопку она замыкается и уровень изменяется на низкий.
Для проверки работы кнопки будем использовать включение светодиода.
while (1)
{
CLRWDT(); // сброс сторожевого таймера
if (RB6==0)LATB1=1;
else LATB1=0;
}
В этом примере мы проверяем состояние на входе порта рано “0” (низкому уровню, если да включаем светодиод, иначе выключаем.
Хоть наши достижения и радуют, но усложним программу. Сделаем так чтобы при одном нажатии на нашу кнопку светодиод загорался, а при втором погасал. В принципе ничего сложного, только один маленький нюанс. При замы замыкании или размыкании механического контакта, происходить так называемый “дребезг”.
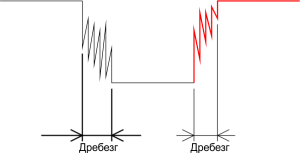 В нашей схеме уровни сигнала будут иметь следующий вид. Это происходит в следствии свойства механического контакта, при соединении контактов сопротивление изменяется пропорционально силе сжатия и на протяжении 10-20 миллисекунд, пока кнопка нажимается возникает такой переходной процесс. Когда уровень сигнала пересекает логический уровень переключения входа порта контроллера, контроллер из-за своей высокой скорости опроса порта может “решить”, что кнопка нажималась не один раз а 20 :). Поэтому для входов которые выполняют подсчет импульсов приходящих с механических контактов необходимо решить проблему “отсеивания” дребезга контакта. Как это решить. Логически это решается просто. При опросе входа порта, если программа обнаружила низкий логический уровень необходимо подождать 10 миллисекунд и снова проверить уровень на входе порта. Если уровень низкий, делаем вывод кнопка нажата, если уровень высокий, значит была “какая то помеха”.
В нашей схеме уровни сигнала будут иметь следующий вид. Это происходит в следствии свойства механического контакта, при соединении контактов сопротивление изменяется пропорционально силе сжатия и на протяжении 10-20 миллисекунд, пока кнопка нажимается возникает такой переходной процесс. Когда уровень сигнала пересекает логический уровень переключения входа порта контроллера, контроллер из-за своей высокой скорости опроса порта может “решить”, что кнопка нажималась не один раз а 20 :). Поэтому для входов которые выполняют подсчет импульсов приходящих с механических контактов необходимо решить проблему “отсеивания” дребезга контакта. Как это решить. Логически это решается просто. При опросе входа порта, если программа обнаружила низкий логический уровень необходимо подождать 10 миллисекунд и снова проверить уровень на входе порта. Если уровень низкий, делаем вывод кнопка нажата, если уровень высокий, значит была “какая то помеха”.
Для реализации такого варианта программы нам понадобиться еще один контрольный флаг. Назовем его NAG. Для чего он нужен. Он необходим чтобы программа могла понять при тестировании порта кнопка “только что нажата” или “уже давно начата”. Без этого флага у нас не получиться счетного входа.
while (1)// основной цикл программ
{
CLRWDT(); // сброс сторожевого таймера
if (RB6==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB6==0&&NAG==0) // снова тестируем состояние порта и флаг "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
}
}
else
{
NAG=0; // сбросить флаг "кнопка нажата" - исходя из логики
}
} // конец основного цикла
Что делает эта программа описано в комментариях к каждой строке. Запустите программу и проверьте её работу. Одно примечание, контакты бывают разные, тактовая кнопка это один из вариантов “почти идеального” контакта, если в режиме тестирования вы наблюдаете, что “не четко срабатывает счет”, например, наблюдается при нажатии несколько переключений светодиода. То необходимо увеличить величину задержки.
Как видите из этих промеров – микроконтроллеры это просто.
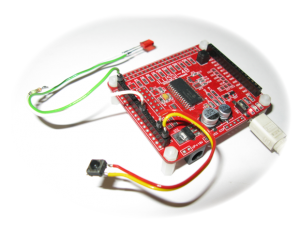
В заключении усложним программу. Подключит к плате вторую кнопку. И используя интерфейс связи с ПК (программу Serial Bootloader AN1310). Организуем реверсивной счетчик. Информация будет выводиться прямо в оно программы.
Саму программу описывать не буду, Пора включить мозги и разобрать самостоятельно. Для пояснения добавлю, что мы будем использовать стандартную библиотеку Си stdio.h. из её нас интересует функция printf. Для работы последовательным интерфейсом необходимо будет включить в нашей прорамме модуль UART и настроисть скорость для приложений в программе AN1310 – 115200 бод.
Все сообщения на ПК выводим на английском, к сожалению русскими символами наш терминал программы AN1310 не владеет только ANSI.
/************************************************************************
* Copyright (c) 2012, Project - ILLISSI.
*
* Демонстрационная программа "опрос тактовых кнопок" + связи с последовательным портом
* системная плата ILLISSI-B4-primum
* для контроллеров PIC16(L)F1936
* функции
* при нажатии на клавиатуре ПК клавиши "1" - можно включать выключать светодиод на демо плате
* при нажатии на кнопки на демо плате можно включать ылючать светодиод, при этом увеличивается
* или уменьшается состояние переменной counter, значение которой выводиться на ПК.
* Author Date Comment
*************************************************************************
* Гена Чернов 27/07/12 V1.0
*
************************************************************************/
#include
#include
// конфигурирование контроллера
__CONFIG(
FOSC_INTOSC & // INTOSC oscillator: I/O function on CLKIN pin
WDTE_ON & // WDT disabled
PWRTE_ON & // PWRT enabled
MCLRE_ON & // MCLR/VPP pin function is digital input
CP_ON & // Program memory code protection is enabled
CPD_ON & // Data memory code protection is enabled
BOREN_ON & // Brown-out Reset enabled
CLKOUTEN_OFF & // CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin
IESO_OFF & // Internal/External Switchover mode is disabled
FCMEN_OFF); // Fail-Safe Clock Monitor is disabled
__CONFIG(
WRT_ALL & // 000h to 7FFh write protected, no addresses may be modified by EECON control
PLLEN_ON & // 4x PLL enabled
STVREN_OFF & // Stack Overflow or Underflow will not cause a Reset
BORV_HI & // Brown-out Reset Voltage (VBOR) set to 2.7V
LVP_OFF); // High-voltage on MCLR/VPP must be used for programming
#define _XTAL_FREQ 32000000
#define BAUDRG 68 // 115.2Kbps from 32MHz (BRG16 = 1)
__EEPROM_DATA(0, 1, 2, 3, 4, 5, 6, 7);
unsigned char data;
void interrupt isr(void);
void putch(unsigned char byte);
bit NAG;
int counter;
//--------------------------------
void main(void)
{
CLRWDT(); // сброс сторожевого таймера
// настройка генератора 8*4=32мГц
OSCCON=0b11110000;
// ||||||||
// ||||| ++-- SCS основной генератор (работа через PLL)
// |++++----- IRCF частота 8 мГц
// +--------- SPLLEN умножитель 1-включен
// конфигурирование портов
TRISA = 0;
PORTA = 0;
ANSELA = 0;
TRISB = 0b11000000; // это типа гибридной настройки, два на ввод данных, остальные на вывод
// || +--- порт на вывод данных - RB1 индикация - светодиод
// |+--------- порт на ввод данных - RB6
// +---------- порт на ввод данных - RB7
PORTB = 0;
ANSELB = 0;
PORTC = 0;
TRISC = 0b11000000; // для работы EUSART
SPBRGH = 0;
SPBRG = BAUDRG;
BAUDCON = 0; // регистр управления скорости передачи
BRG16 = 1; // установить бит BRG16: используется 16-битный генератор Baud Rate
TXSTA = 0b00100100;
// |||||||+--TX9D:
// ||||||+---TRMT:Transmit Shift Register Status bit
// |||||+----BRGH:1 = High speed
// ||||+-----SENDB:Send Break Character bit
// |||+------SYNC:0 = Asynchronous mode
// ||+-------TXEN:1 = Transmit enabled
// |+--------TX9:0 = Selects 8-bit transmission
// +---------CSRC: в асинхронном режиме не имеет значения (Все равно)
RCSTA = 0b10010000;
// |||||||+--RX9D:
// ||||||+---OERR: Overrun Error bit
// |||||+----FERR: Framing Error bit
// ||||+-----ADDEN: Address Detect Enable bit
// |||+------CREN:1 = Enables receiver
// ||+-------SREN: Single Receive Enable bit (Все равно)
// |+--------RX9: 9-bit Receive Enable bit
// +---------SPEN: Serial Port Enable bit Serial port enabled
// configure timer 0 for maximum prescaler and enable interrupt
TMR0 = 0;
T0IE = 1;
OPTION_REG = 0b11010111;
nWPUEN = 0; // включить резисторы
WPUB = 0b11000000; // выключить подтягивающие резисторы на выводах 5-0 (по сбросу включены)
__delay_ms (100); // запрос задержки в миллисекундах
ei(); // включить прерывания
printf("\n\n Version = 1.01 \r\n\n");
printf(" Poll clock buttons!! \nPIC16(L)F1936 Demosoft\r\n");
printf(" web site illissi.com\r\n");
printf(" click!\r\n");
//--------------------------------------------------------------------------
while (1)
{
CLRWDT(); // сброс сторожевого таймера
if(RCIF)
{
// RCIF=0;
if(FERR && (RC7 == 0))
{
// RXD состояние BREAK обнаружено, переключиться обратно в режим загрузчика.
di(); // отключить прерыания
#asm
clrf _PCLATH // сбросить страший регистр счетчика алресса
goto 0 // (должно быть выполненно только из основного цикла, чтобы избежать переполнения стека вызовов)
#endasm
}
data = RCREG;
// putch(data);
switch(data)
{
case '1':
putch(data);
LATB1=!LATB1;
break;
default:
printf("\r\n");
putch(data);
printf(" - it is not a command, type the commands LEDs 1,2,3,4\r\n");
break;
}
}
if (RB6==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB6==0&&NAG==0) // снова тестируем состояние порта и флага "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
counter++;
printf("counter++: %d\r\n", counter);
}
}
else if (RB7==0) // тестируем состояние порта
{
__delay_ms(10); // ожидаем 10 мс, пропускаем дребезг
if (RB7==0&&NAG==0) // снова тестируем состояние порта и флага "кнопка была нажата"
{ // если уровень низкий и клавиша, до этого не была нажата" выполняем код в скобках
NAG=1; // устанавливаем флаг кнопка нажата
LATB1=!LATB1; // переключаем свечение светодиода
counter--;
printf("counter--: %d\r\n", counter);
}
}
else
{
NAG=0; // сбросить флаг "кнопка нажата" - исходя из логики
}
}
}//
// прерывания
void interrupt isr(void)
{
static signed char timerd = 0;
T0IF = 0;
if(timerd++ > 20) // период мигания светодиода
{
timerd = 0;
LATB0=!LATB0; // индикация работы таймера
}
}//
// передача байта
void putch(unsigned char byte)
{
while(TXIF == 0); // ожидание готовности передачи
TXREG = byte;
}//
Загрузить первый пример
Цифровой ввод данных - Чтение состояния кнопок 00 1.35 KB 839 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 01 1.62 KB 761 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 02 2.97 KB 753 downloads
Цифровой ввод данных - Чтение состояния кнопок...Цифровой ввод данных - Чтение состояния кнопок 03 9.43 KB 884 downloads
Цифровой ввод данных - Чтение состояния кнопок...
Это может быть интересно
 Интерактивные LedVisits: 453 Тема проекта продолжение следует…. Это может быть интересно
Интерактивные LedVisits: 453 Тема проекта продолжение следует…. Это может быть интересно Проект с использованием MCC часть 16Visits: 1051 Продолжим изучение EUSART. На этом этапе отработает передачи данных с ПК и получения эха. Для этого в основной цикл программы добавим код if(EUSART_DataReady) // проверим флаг готовности данных …
Проект с использованием MCC часть 16Visits: 1051 Продолжим изучение EUSART. На этом этапе отработает передачи данных с ПК и получения эха. Для этого в основной цикл программы добавим код if(EUSART_DataReady) // проверим флаг готовности данных … ch-светомузыка от теории до реализацииVisits: 682 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического …
ch-светомузыка от теории до реализацииVisits: 682 Сразу оговоримся технология или теория ch-светомузыки, это постоянно развивающийся процесс и то что будет сказано сегодня завтра может быть опровергнуто и считаться ошибочным. Назовем само решение проблемы автоматического … Customs codes for exportVisits: 88 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для …
Customs codes for exportVisits: 88 Митні коди (HS Code) для надсилання посилок за кордон. Для відправки товару за кордон на сьогодні необхідно зазначати митні коди. Часто визначення коду займає багато часу. Для … PIC32MZ – прерывания (заметки)Visits: 447 Виды формирования запоминая контекста при входе в прерывания. Компилятор представляет три варианта AUTO – когда запоминания места возврата из подпрограммы возложено на программу, т.е все создается программно. Этот …
PIC32MZ – прерывания (заметки)Visits: 447 Виды формирования запоминая контекста при входе в прерывания. Компилятор представляет три варианта AUTO – когда запоминания места возврата из подпрограммы возложено на программу, т.е все создается программно. Этот … Real-time music visualization technologyVisits: 93 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації …
Real-time music visualization technologyVisits: 93 Music visualization technology in real time (RTMV-technology). Я не музикант і я не маю спеціальної музичної освіти, я інженер розробник вбудованих систем. Але моє хобі розроблення технології візуалізації … HVLD модуль на примере PIC24FJ128GA204Visits: 618 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что …
HVLD модуль на примере PIC24FJ128GA204Visits: 618 HVLD модуль представляет собой простое устройство, для контроля напряжения питания микроконтроллера или внешнего напряжения (через делитель). Его задача при “выходе” напряжения за заданные пределы сформировать сообщение микроконтроллеру, что … CCP модуль для декодирования ИК-кодов пультов ДУVisits: 1035 Множество изготовителей для своих пультов дистанционного управления на ИК лучах используют принцип широтно-импульсной модуляции. В таких кодах бит единицы представляется импульсом большой длительности, а ноль импульсом короткой длительности. …
CCP модуль для декодирования ИК-кодов пультов ДУVisits: 1035 Множество изготовителей для своих пультов дистанционного управления на ИК лучах используют принцип широтно-импульсной модуляции. В таких кодах бит единицы представляется импульсом большой длительности, а ноль импульсом короткой длительности. … Емкостной сенсорVisits: 2965 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит …
Емкостной сенсорVisits: 2965 Изучаем изготовление емкостных сенсоров на PIC-микроконтроллере. Конструкция емкостных сенсоров имеет вид: Емкостные сенсоры строятся по схеме высокочастотного генератора, сам принцип основан на измерение частоты этого генератора. Частота зависит … CLUBBEST – reasoning on the visualization of music.Visits: 104 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
CLUBBEST – reasoning on the visualization of music.Visits: 104 ВІД ЗАХОДУ ДО СВІТАНКУ АБО ПОБАЧИТИ МУЗИКУ. Час доби, коли почуття людини загострюються, – це час від заходу до світанку. В цей час людина відкрита для …
Как заставить мигать светодиод

Visits: 4302
Управление светодиодом – это для начинающего разработчика встроенных систем сказать на языке Си – “Привет мир”.
Как заставить мигать светодиод.
Для начала, что такое светодиод?
Светодио́д или светоизлучающий диод (СД, СИД, LED англ. Light-emitting diode) — полупроводниковый прибор с электронно-дырочным переходом, создающий оптическое излучение при пропускании через него электрического тока (а более подробнее читаем в Википедии). Т.е. нам 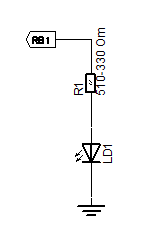 нужен любой светодиод. Рабочее напряжение нашей учебной платы ILLISSI-4B-03-primum 5 вольт, а светодиода, в зависимости от цвета, может быть от 1,8 до 3,2 вольта. Нам еще понадобиться резистор, для ограничения тока протекающего через него. Эту сложную схему придется спаять :).
нужен любой светодиод. Рабочее напряжение нашей учебной платы ILLISSI-4B-03-primum 5 вольт, а светодиода, в зависимости от цвета, может быть от 1,8 до 3,2 вольта. Нам еще понадобиться резистор, для ограничения тока протекающего через него. Эту сложную схему придется спаять :).

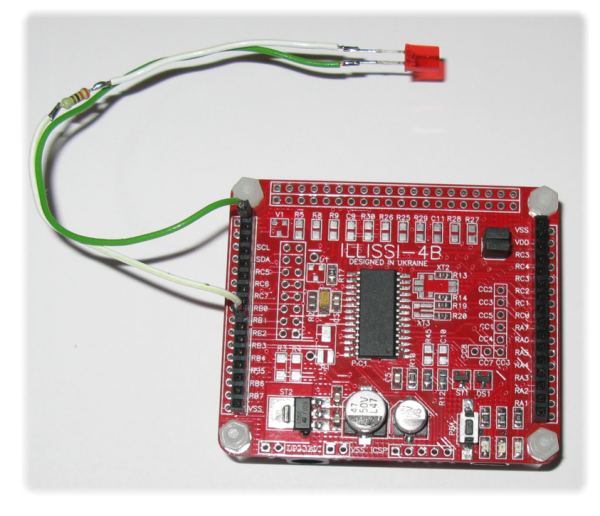
Подключим светодиод к порту B выводу RB1. На фото белый провод, это “+” светодиода. Этот провод необходимо соединить
с с выводом порта RB1. Другой с контакту с надписью Vss. Вариант подключения хорошо виден на фото. Почему вариант? На плате ILLISSI-4B-03-primum есть несколько выводов для подключения к шине Vss “земля”, можно использовать любой из них.
Самый простой способ заставить мигать светодиод, это организовать в главном цикле программы задержку и по окончанию задержки переключать состояние светодиода на противоположное. В Си это будет выглядеть очень
просто:
while (1)
{
CLRWDT(); // сброс сторожевого таймера
__delay_ms(1000); // задержка в 1 секунду
LATB1=!LATB1; // переключить светодиод
}
Чтобы менять частоту импульсов необходимо изменить число 1000. Что обозначает каждая строчка. Цикл while (1) { } – это бесконечный цикл, главный цикл нашей программы. __delay_ms(1000); – макрос задержки – в этом мести процессор контроллера выполняет цикл задержки с длительно нами заданной. LATB1 = !LATB1 – это сама команда переключения светодиода. Для управления используем регистр LATB, это регистр управления выходными сигналами порта B. А читать строку программы необходимо так, присвоить LATB1 значение “инверсное” его текущему состоянию. Т.е. если был “0”, то станет “1” и наоборот. Команда CLRWDT(); – это сброс сторожевого таймера, это тот таймер который контролирует отсутствие сбоев (зависания) нашей программы (он в регистре конфигурации нашей программы включен).
А размер самой программы тоже не очень велик, основной текст, это конфигурирование контроллера под наши нужды:
#include // конфигурирование контроллера __CONFIG( FOSC_INTOSC & // INTOSC oscillator: I/O function on CLKIN pin WDTE_ON & // WDT disabled PWRTE_ON & // PWRT enabled MCLRE_ON & // MCLR/VPP pin function is digital input CP_ON & // Program memory code protection is enabled CPD_ON & // Data memory code protection is enabled BOREN_ON & // Brown-out Reset enabled CLKOUTEN_OFF & // CLKOUT function is disabled. I/O or oscillator function on the CLKOUT pin IESO_OFF & // Internal/External Switchover mode is disabled FCMEN_OFF); // Fail-Safe Clock Monitor is disabled __CONFIG( WRT_ALL & // 000h to 7FFh write protected, no addresses may be modified by EECON control PLLEN_ON & // 4x PLL enabled STVREN_OFF & // Stack Overflow or Underflow will not cause a Reset BORV_HI & // Brown-out Reset Voltage (VBOR) set to 2.7V LVP_OFF); // High-voltage on MCLR/VPP must be used for programmin // сообщить компилятору с какой тактовой частотой работает микроконтроллер #define _XTAL_FREQ 32000000
// сама программа, в начале настройка тактового генератора
void main(void)
{
CLRWDT(); // сброс сторожевого таймера
// настройка внутреннего генератора 8*4=32мГц
OSCCON=0b11110000;
// ||||||||
// ||||| ++-- SCS<1:0> основной генератор (работа через PLL)
// |++++----- IRCF<3:0> частота 8 мГц
// +--------- SPLLEN умножитель 1-включен
// конфигурирование портов микроконтроллера TRISA = 0; PORTA = 0; ANSELA = 0; TRISB = 0; PORTB = 0; ANSELB = 0; PORTC = 0; TRISC = 0;
//---------------------------------------------------------------
// главный цикл, управления миганием светодиода.
while (1)
{
CLRWDT(); // сброс сторожевого таймера
__delay_ms(1000); // задержка в 1 секунду
LATB1=!LATB1; // переключить светодиод
}
}//
Поэкспериментируйте с константой – 1000 в макросе __delay_ms, установите последовательно значения – 500, 250, 125.
Примечания. Это только пример и такое управление в реальных проектах не приемлемо. В современных проектах для формирования длительности удобнее использовать встроенные таймеры контроллера и через систему прерываний управлять длительностью мигания светодиода.
Полностью проект можно скачать Среда MPLAB v8.85, компилятор HI-TECH C Compiler for PIC10/12/16 MCUs (PRO Mode) V9.83
Это может быть интересно
 ESP32-первое знакомствоVisits: 6338 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как …
ESP32-первое знакомствоVisits: 6338 Музыкальная тема к статье, слушаем: Настало время познакомиться c ESP32 и для меня, для этого я приобрел в ГАММЕ отладочную плату с модулем ESP-WROOM-32 (ESP32-DevKitC). Первая задача, как … LATINO – открытый проект ch-светомузыкиVisits: 1642 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была …
LATINO – открытый проект ch-светомузыкиVisits: 1642 Проект построенный на некоторых принципах ch-светомузыка. Проект ознакомительный предназначен, для самостоятельного построения простого и эффективного светосинтезатора. Вывод осуществляется на ВОУ собранной на драйверах HL1606. Для этого была … Altium Designer – подготовка документации для производства и сборки печатных платVisits: 3619 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем …
Altium Designer – подготовка документации для производства и сборки печатных платVisits: 3619 В процессе освоения Altium Designer много возникает вопросов по подготовке документации для производства плат, а также для её сборки. Altium Designer позволяет сделать все требуемые документы, хотя скажем … Проект с использованием MCC часть 07Visits: 945 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы …
Проект с использованием MCC часть 07Visits: 945 Модуль PWM – широтно импульсная модуляция (ШИМ). ПИК контроллеры часто на борту имеют модули ШИМ. На их основе строятся многие узлы управления электро приводами. В нашем варианте мы … Сумеречное релеVisits: 1427 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока …
Сумеречное релеVisits: 1427 Реле управления освещением, датчик день-ночь – одним словом фотореле для управления освещением или формирования сигнала для системы умный дом о понижении или повышении освещенности относительно заданного уровня. Реле выполнено по классической схеме, конденсаторный блок питания, от сети переменного тока … MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовVisits: 600 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном …
MCC PIC24 – модуль OUTPUT COMPARE – в режиме генератора звуковых сигналовVisits: 600 При проектировании простых устройств автоматики, часто необходимо иметь механизм звукового оповещения. Самый верхний уровень, это формирование голосовых сообщений, но об этом, как то по позже… В самом примитивном … Светодиоды со встроенным драйвером WS2812BVisits: 916 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery …
Светодиоды со встроенным драйвером WS2812BVisits: 916 Производитель http://www.world-semi.com Краткое описание продукции фирмы Каталог продукции” catcatcat_ws_19 catcatcat_ws_15 catcatcat_ws_11 catcatcat_ws_07 catcatcat_ws_03 catcatcat_ws_18 catcatcat_ws_14 catcatcat_ws_10 catcatcat_ws_06 catcatcat_ws_02 catcatcat_ws_05 catcatcat_ws_09 catcatcat_ws_13 catcatcat_ws_17 catcatcat_ws_16 catcatcat_ws_12 catcatcat_ws_08 catcatcat_ws_04 catcatcat_ws_01 This jQuery … WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Visits: 5005 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. …
WiFi ESP8266 – AT команды связанные с функцией TCP/IP (v.1.6.1)Visits: 5005 AT команды связанные с функцией TCP/IP В этом разделе описаны команды которые позволяют устанавливать соединения между серверами и клиентами в сети. Приведено описание команд и примеры их выполнения. … MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Visits: 454 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника …
MCC PIC24 – модуль REAL-TIME CLOCK AND CALENDAR (RTCC)Visits: 454 RTCC предоставляет пользователю часы реального времени и функция календаря (RTCC), точность “хода” может быть откалибрована. Основные особенности модуля RTCC: • Работает в режиме глубокого сна. • Возможность выбора источника … Проект с использованием MCC часть 11Visits: 820 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость …
Проект с использованием MCC часть 11Visits: 820 Можно несколько облагородить программу вынести наши процедуры обработки нажатия кнопок в отдельные функции. Но вы должны понимать, что это хоть и не значительно, но будет тормозить общую скорость …